§ 3. Система ПВО Швеции "Стрил-60"
В Швеции принята на вооружение полуавтоматическая система управления активными средствами ПВО "Стрил-60". Система предусматривает создание нескольких оперативных центров, в которых будет осуществляться сбор, обработка, отображение и оперативная подача информации, необходимой для решения задач ПВО.
Система "Стрил-60" обеспечивает управление не только истребителями-перехватчиками, но и орудиями зенитной артиллерии, пусковыми установками ЗУРС и артиллерией военно-морских сил (рис. 10.11).
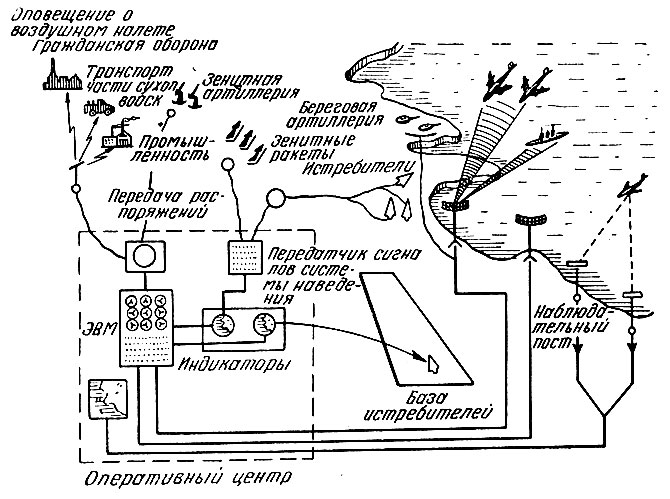
Рис. 10.11. Структурная схема шведской системы управления средствами ПВО 'Стрил-60'
Отдельные элементы системы начали вводиться в строй в 1962 г. В 1964 г. закончена разработка основной части системы ПВО - современная система обработки и отображения радиолокационной информации "Диджитрак". Система "Диджитрак" разработана шведской фирмой "Стандарт радио и телефон" (SRT).
Основными элементами системы "Диджитрак" являются: вычислительная машина "Сенсор", индикаторы, блок азимутальной развертки, генератор символов (для обеспечения "синтетической" индикации) и средства связи с другими центрами обработки данных.
Аппаратура "Диджитрак" сконструирована на базе модулей и дает возможность в соответствии с требованиями формировать простые или сложные (комплексные) системы, которые в общем могут выполнять следующие функции:
- отображать необработанные радиолокационные данные;
- формировать и индицировать опорные линии (пеленга и т. п.);
- вырабатывать и отображать символы;
- определять траекторию и скорость полета цели;
- производить обработку радиолокационных данных;
- осуществлять автоматическое сопровождение целей;
- обеспечивать обработку данных о высоте;
- отображать данные на различных индикаторных устройствах;
- сопрягаться с другими вычислительными машинами.
Источники информации. В качестве исходных данных система "Стрил-60" использует информацию, поступающую от развитой сети наземных, корабельных и самолетных радиолокационных станций. В системе предусматривается получение данных и от постов визуального наблюдения.
Аппаратура "Диджитрак" может сопрягаться с большинством существующих типов РЛС. В системе радиолокационного обнаружения воздушных целей применяются несколько типов радиолокационных станций, имеющих различное назначение. К ним относятся как обычные радиолокационные станции обнаружения, так и радиолокационные высотомеры (рис. 10.12). Могут быть использованы также и более современные трехкоординатные РЛС.
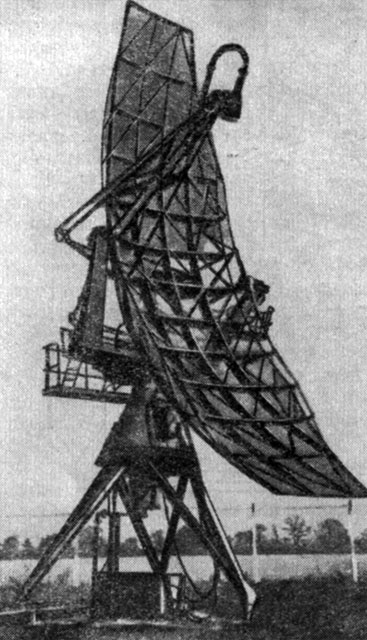
Рис. 10.12. Радиолокационный высотомер 'Декка HF-200' в системе ПВО Швеции
Планом внедрения системы "Стрил-60" предусматривается значительное расширение сети радиолокационных станций раннего обнаружения, обеспечивающих обнаружение целей как на больших, так и на малых высотах. В связи с этим разработаны и приняты на вооружение радиолокационные станции дальнего действия, обеспечивающие одновременно и определение высоты целей. Дальность действия таких станций составляет более 400 км.
Обработка радиолокационных данных (рис. 10.13). Съем и обработка радиолокационных данных перед их поступлением в вычислительную машину производятся автоматически аппаратурой "Диджитрак" с помощью корреляторов видеосигналов и блока азимутальной развертки. Видеокоррелятор позволяет эффективно и надежно выделить полезный радиолокационный сигнал на фоне шумов. Разрешающая способность коррелятора по азимуту на максимальной дальности равна 500 м.
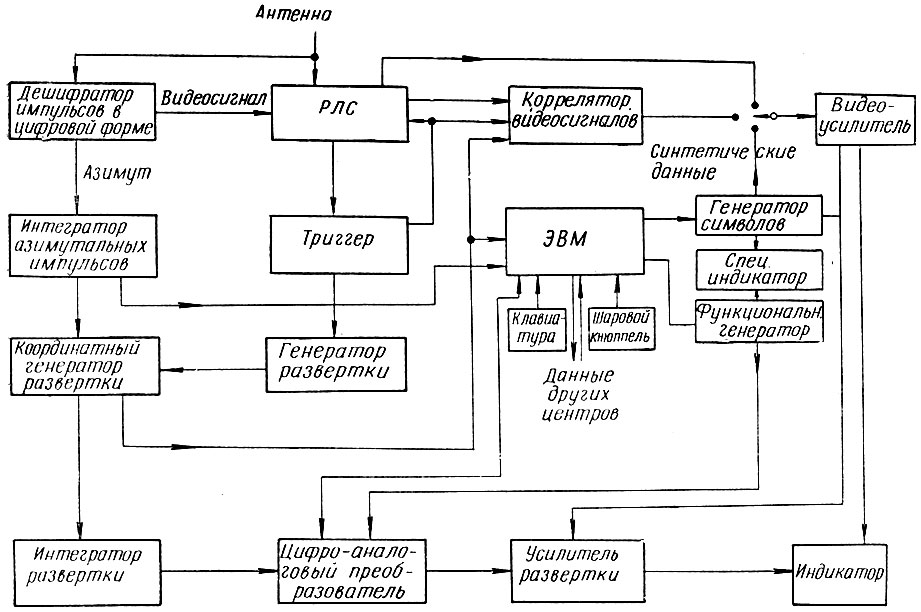
Рис. 10.13. Блок-схема системы обработки данных и индикации 'Диджитрак'
ЭВМ "Сенсор". Вычислительная машина в системе "Стрил-60" выполняет операции по сопровождению целей, управлению знаковой индикацией и решению задачи перехвата. Для небольшой системы ПВО эти функции может выполнять одна ЭВМ. Для более крупных систем решение задачи перехвата может выполняться отдельной ЭВМ. При системе, которая должна обеспечить сопровождение 200 радиолокационных целей, используется отдельная ЭВМ для выполнения каждой важной задачи. Как видно, в использовании вычислительных машин в этом случае требуется определенная гибкость и ЭВМ "Сенсор" этому требованию отвечает.
ЭВМ "Сенсор" рассчитана на параллельную работу нескольких таких же вычислительных машин. При этом общая память их может составлять от 2048 до 32 768 слов, состоящих из 40 двоичных единил каждое.
Параллельная работа нескольких ЭВМ (до 16 шт.) возможна благодаря внутренним линиям связи, которые могут обеспечить передачу 166000 слов (по 40 двоичных единиц каждое) в секунду.
Следовательно, емкость системы "Диджитрак" практически не ограничена и зависит от числа используемых ЭВМ "Сенсор". Одна ЭВМ "Сенсор", например, может обработать результаты автоматического слежения за 200 воздушными целями. Емкость памяти ЭВМ, если потребуется, может быть увеличена за счет добавления отдельных модулей, каждый из которых рассчитан на слежение за 50 траекториями.
Таким образом, для обеспечения сопровождения 200 целей вычислительный комплекс системы "Диджитрак" состоит из ЭВМ сопровождения (с памятью на 8192 слова), ЭВМ символов (на 4096 слов) и ЭВМ наведения (на 8192 слова).
Иногда для упрощения системы и снижения загрузки вычислительных машин в помощь им применяются вспомогательные устройства (такие, как блок азимутальной развертки, функциональный генератор), имеющие постоянные программы для выполнения повторяющихся стандартных (типовых) операций (рис. 10.14).
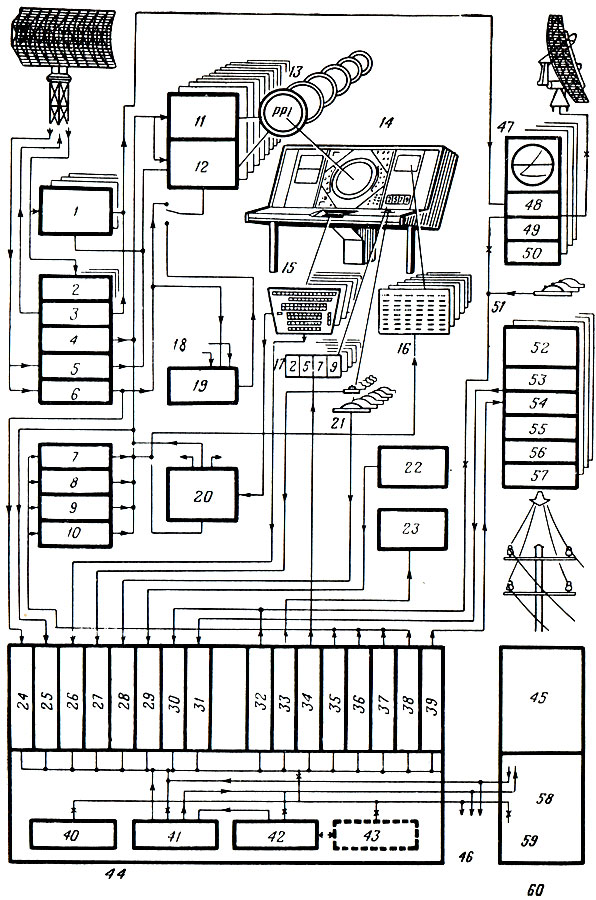
Рис. 10.14. Функциональная схема системы обработки данных и индикации 'Диджитрак': 1 - генератор видеокарты; 2 - пеленг; 3 - запускающее устройство; 4 - блок развертки; 5 - видеосигнал; 6 - коррелятор видеосигналов; 7 - генератор знаков; 8 - линии пеленга; 9 - векторные линии; 10 - траектория полета; 11 - усилитель развертки; 12 - видеосигнал; 13 - ИКО; 14 - пульт оператора; 15 - клавиатура; 16 - табло; 17 - цифровой индикатор; 18 - дополнительные радиолокационные каналы; 19 - наложение видеосигналов; 20 - распределитель указательных символов; 21 - шаровой кнюппельный механизм; 22 - управление имитатором; 23 - контроль с помощью тест-программы (тест); 24 - видеосигнал в цифровой форме; 25 - координаты в цифровой форме; 26 - ручной ввод данных; 27 - ввод данных шаровым механизмом; 28 - информация, вводимая шаровым механизмом; 29 - входные данные имитатора; 30 - входные данные от радиолокационного высотомера; 31 - входные данные от линии связи; 32 - данные о цели; ^ - результаты теста; 34 - выходные данные в цифровой форме; 35 - управление генератором знаков; 36 - управление линией пеленга; J7 - управление векторной линией; 38 - управление функциональным генератором; 39 - выходные данные на линии связи; 40 - арифметическое устройство; 41 - управление программой; 42 - память на магнитных сердечниках; 43 _ дополнительная память; 44 - основные устройства аппаратуры обработки данных; 45 - входные и выходные устройства; 46 - дополнительная ЭВМ; 47 - индикатор высоты; 48 - развертка; 49 - преобразователь координат; 50 - видеоусилитель; 51 - управление линией высоты; 52 - приемник узкополосной линии связи; 53 - информация от пеленгатора; 54 - символическая индикация координат; 55 - наведение; 56 - местоположение высотомера; 57 - ответ высотомера; 58 - ввод и контроль программы; 59 - буферная память; 60 - ЭВМ наведения
Аппаратура системы выполнена на полупроводниковых приборах. В аппаратуре используется ограниченное число стандартных модулей, собранных на панелях с печатным монтажом.
Для простоты обслуживания панели собираются в субблоки, которые легко вынимаются из стойки для осмотра во время работы. Неисправный субблок может быть легко удален и заменен другим. На каждой панели имеются легкодоступные контрольные точки.
Обнаружение неисправностей облегчается благодаря наличию сигнальных индикаторных лампочек, постоянных тест-программ и диагностических программ, записанных на магнитной ленте и используемых исключительно для обнаружения неисправностей.
Аппаратура отображения (рис. 10.14 и 10.15). Воспроизведение воздушной обстановки и другой информации в системе "Диджитрак" осуществляется на типовых индикаторах кругового обзора (с электроннолучевыми трубками диаметром 30 и 40 см), индикаторных табло и специальных экранах "синтетической" индикации. Кроме того, возможно использование индикаторов с экранами черно-белого и цветного телевидения.
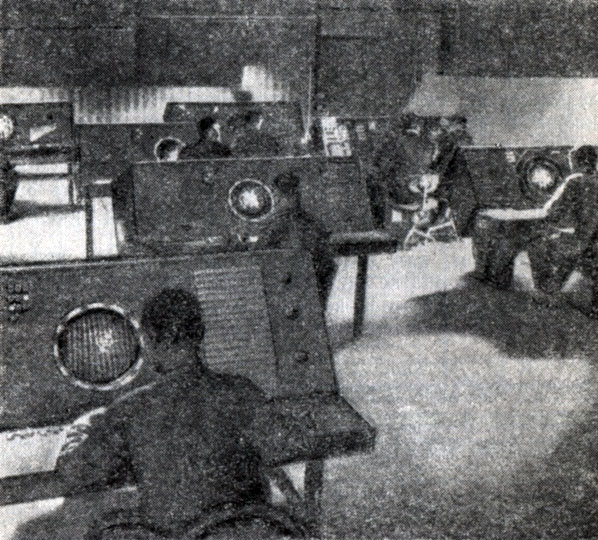
Рис. 10.15. Пульты боевого управления системы 'Стрил-60'
На индикаторах кругового обзора могут быть отображены первичная радиолокационная информация, видеокарта, азимутальные метки, кольца дальности, пеленг на объект, а также различные символы, вырабатываемые посредством знакогенерации.
Особенностью системы "Диджитрак" является то, что развертка на индикаторах, осуществляемая синхронно с вращением антенны, для удобства сопряжения со всей аппаратурой применяется не в аналоговой форме, как обычно принято, а в цифровой. Это осуществляется с помощью цифрового шифратора, установленного у антенны, который выдает серию плотно расположенных импульсов, среди которых имеется импульс "север" для синхронизации. Развертка, генерируемая в цифровой форме, затем преобразуется с помощью скоростного цифро-аналогового преобразователя в аналоговую форму. Получаемое при этом время задержки (около 60 мксек) позволяет представить на индикаторе кругового обзора большое количество символической ("синтетической") информации в виде междускановых сигналов (символической информации, проходящей между следующими друг за другом циклами развертки).
Характеристика цели с помощью символов (формуляр цели) состоит из групп букв, цифр и различных геометрических фигур. Применение знаковой индикации потребовало введения электронной системы коммутации, которая осуществляется вычислительной машиной при взаимодействии ее с устройствами сопровождения и генерации символов через линии взаимосвязи. Для этой цели обычно применяется отдельная ЭВМ управления (administration computer), которая автоматически или по запросу оператора выдает "символическую" информацию на индикаторы. Например, оператор путем запроса ЭВМ управления может присвоить номер неопознанной цели. Номер цели также может быть связан с позывным самолета. (Номер цели может быть присвоен в соседнем оперативном центре и передан в данный центр.) Каждый оператор может иметь свой собственный символ для маркировки целей, которые он обрабатывает и контролирует.
Пульт оператора в системе "Диджитрак" состоит из индикатора кругового обзора, табло, органов управления и связного оборудования. Основными органами управления на пульте, служащими в качестве средств связи оператора с машиной, являются клавиатура и шаровой кнюппель. С их помощью выбираются вид знаков и их положение на экране. Кроме того, имеется ряд кнопок, которые позволяют выбрать определенные режимы работы аппаратуры или каналы прохождения радиолокационных сигналов и другой информации. Таким образом могут быть выбраны: линейный или логарифмический закон для усилителя промежуточной частоты, мгновенная автоматическая регулировка усиления (МАРУ), малая постоянная времени, вид радиолокационной информации (обработанные или необработанные видеосигналы) от любой присоединенной РЛС. Кроме того, можно выбрать различные виды индикации: сложная картина полной радиолокационной обстановки (от нескольких РЛС) или чисто "синтетическая" картина, состоящая из одних только символов.
Вид знака (символа) выбирается оператором с помощью клавиатуры, а наложение его на картину воздушной обстановки в нужную точку экрана производится посредством шарового кнюппеля. Шаровой кнюппельный механизм вырабатывает серию импульсов для получения координат X и У, которые интегрируются и обеспечивают координатные данные для ЭВМ управления. Эти данные затем передаются в ЭВМ сопровождения, а после нее возвращаются снова в ЭВМ управления в виде скорости и курса цели. ЭВМ управления использует эту информацию для расчета прогнозируемого положения цели и эти данные выдает в систему отображения с повышенной скоростью с тем, чтобы коррекцию положения цели можно было бы произвести за время между следующими друг за другом циклами развертки.
Вся "синтетическая" информация отображается на индикаторах как междускановая информация. Стандартная частота появления "символической" информации на экране индикатора 14 гц. Иногда частота выбирается более низкой для привлечения внимания оператора.
Для надлежащего расположения символа на экране индикатора необходимо выработать координаты этого символа X и У. Это осуществляет генератор символов с помощью специальной программы, заложенной в ЭВМ управления. ЭВМ управления выдает команды генератору символов для закрепления определенного символа за конкретной целью для облегчения ее дальнейшего опознавания. Каждый символ состоит из 16 точек, располагаемых в любом месте сетки (матрицы размером 32x32 точки) в соответствии с командами программы.
Для того чтобы предотвратить перегрузку индикатора кругового обзора от поступающей многочисленной знаковой информации и затемнение символами общей картины воздушной обстановки, на индикаторном устройстве применяется дополнительный индикатор (табло), на котором по желанию оператора может быть отображено значительное количество дополнительной ("синтетической") информации (до 150 знаков).
Связь операторов между собой осуществляется с помощью клавиатурных устройств через релейный блок. Релейный блок срабатывает непосредственно от переключателей клавиатуры, преобразует каждый импульс переключателя в код и передает его в ЭВМ. Через релейный блок проходит ответный сигнал запрашивавшему адресату. Это снижает нагрузку на вычислительную машину и упрощает программирование.
Некоторая полезная информация отображается и на телевизионных экранах индикаторов. Изображение обстановки на цветном телевизионном экране получается путем проецирования на него отдельных изображений, обозначенных красным, синим и зеленым цветами. Черно-белые телевизионные экраны используются для индикации вспомогательных данных, например карты метеорологической обстановки в районе боевых действий и т. п.
Организационная структура и боевая работа центра. Организация оперативного центра ПВО может иметь несколько вариантов в зависимости от поставленных оперативных задач и, следовательно, от оснащения центра соответствующей аппаратурой.
Организационная структура типового центра показана на рис. 10.16.
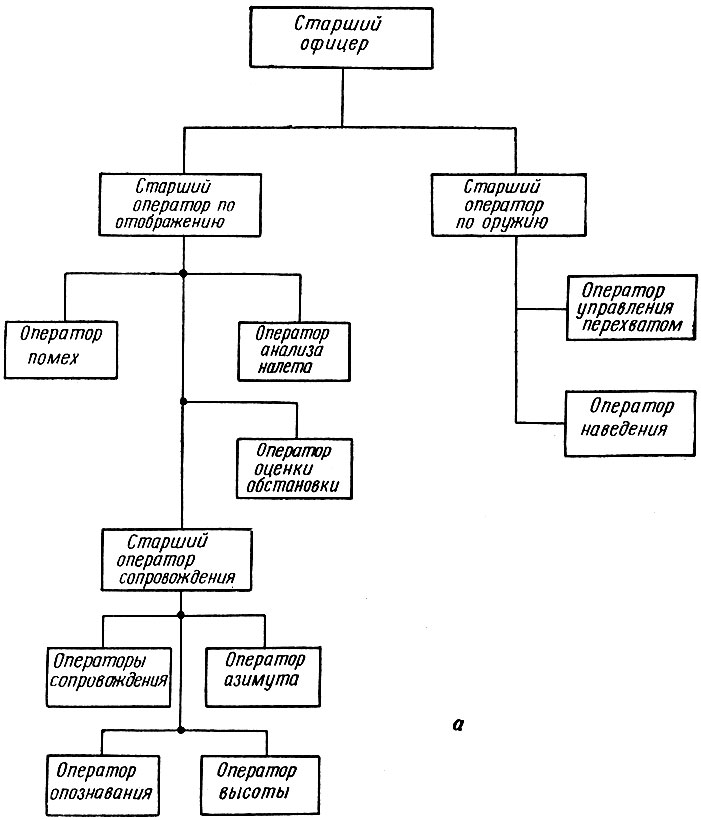
Рис. 10.16. Организационная структура центра ПВО, использующего систему 'Диджитрак'
Центр возглавляется начальником штаба (старшим офицером). Он отвечает за все его действия. Ему помогают две группы операторов. Первая группа, возглавляемая старшим оператором по отображению, обеспечивает опознавание и сопровождение всех наблюдаемых и переданных с других центров целей. Вторая группа, возглавляемая старшим оператором по оружию, является ответственной за назначение боевых средств и управление активными средствами (истребителями или ЗУРС) в ходе боевых действий.
Оператор помех ведет борьбу с радиопротиводействием средствам ПВО в масштабе всего сектора. Оператор анализа налета собирает всю информацию по наблюдаемым целям и анализирует ее. На его индикаторе наблюдаемая картина может быть увеличена для более детального изучения обстановки.
Старший оператор сопровождения несет ответственность за надежное сопровождение целей, включая опознавание и измерение высоты. Он следит за работой других операторов сопровождения, которые осуществляют ввод цели и контроль за автоматическим сопровождением целей машиной. Число операторов сопровождения зависит от предусмотренной возможности центра по количеству сопровождаемых целей.
Кроме того, имеется один или больше операторов опознавания, которые используют аппаратуру IFF или SIF и наземные РЛС обнаружения.
Данные о высоте цели очень важны для проведения операции перехвата, поэтому аппаратура системы "Диджитрак", при возможности, рассчитана на работу с трехмерными РЛС. В настоящее время высота измеряется местным или находящимся на удалении радиолокационным высотомером, запрос на который посылается оператором или вычислительной машиной по специальной программе. Местным высотомером управляют операторы высоты (один или несколько, в зависимости от степени автоматизации этой операции).
Вся информация о целях обрабатывается и изучается оператором оценки обстановки. Используя средства "синтетической" информации, он может сопоставлять информацию, полученную в самом центре, со всей информацией, переданной в центр по линиям связи извне. Это сопоставление (корреляция) осуществляется автоматически вычислительной машиной и тщательно изучается оператором оценки обстановки, прежде чем выдать ее для использования в центре. Оператор оценки обстановки отвечает за информацию о воздушных целях, передаваемую в другие центры.
В другой группе операторов может быть один или несколько операторов управления перехватом, которые обеспечивают выдачу в ЭВМ управления оружием данных, необходимых для проведения операции перехвата или возвращения самолетов на аэродром. У этих операторов, кроме основного индикатора, имеются два дополнительных: табло, на котором представляется необходимая информация о всех возможных целях в табличной форме, и специндикатор с прямоугольным экраном, на котором отображаются результаты расчетов по перехвату в виде расчетной траектории полета истребителя, изображаемой в том же масштабе, что и картина воздушной обстановки. Траектория полета истребителя вырабатывается отдельным функциональным генератором, работающим по принципу работы цифровой вычислительной машины. Оператор может легко оценить результаты расчетов и наблюдать, как истребитель выполняет передаваемые ему команды.
Оператор наведения ЗУРС может также находиться в центре. В его обязанность входит координация огня батарей ЗУРС на назначенные цели. Он, кроме того, может обрабатывать и распределять информацию, получаемую от РЛС подсвета цели между батареями ЗУРС.
Активные средства и их использование. В шведской системе ПВО используются различные боевые средства. Из истребителей-перехватчиков на вооружении находятся самолеты "Сааб Дракен" J-35. В последнее время на вооружение начали поступать сверхзвуковые всепогодные истребители-перехватчики "Сааб Дракен" J-35A. Предполагается использовать и последнюю модификацию этого самолета - истребитель-перехватчик "Сааб Дракен" J-35F.
Истребители-перехватчики в район перехвата выводятся системой "Стрил-60". В районе цели поиск и слежение за целью осуществляются бортовым радиолокатором. В процессе перехвата после вывода перехватчика в район цели оперативный центр "Стрил-60" продолжает указывать перехватчику направление атаки, передавать необходимые навигационные данные и информацию о цели. Бортовая система управления огнем истребителя определяет оптимальный момент пуска ракет в зависимости от высоты, перегрузки и ракурса цели. Бортовая электронная система управления огнем S7B фирмы "Сааб" обеспечивает перехват и атаку цели на встречно-пересекающихся курсах. Система управления огнем включает в себя два вычислительных блока для расчета траектории цели и гироскопический оптический визир, который используется как резервный при атаке воздушных целей.
В противоположность практике использования других ракетных' систем, где наведение эффективно только на конечном участке траектории, снаряд класса "воздух-воздух" с указанных перехватчиков предполагается запускать в любой момент, когда цели находятся в пределах досягаемости ракет. При этом для получения высоких точностей попадания должны быть удовлетворены следующие требования:
- снаряд должен иметь определенное минимальное значение скорости, при котором обеспечивается надежное управление его траекторией;
- отношение скорости снаряда к скорости цели должно быть достаточно высоким, чтобы цель оставалась в поле "зрения" снаряда.
Оптимальная дальность открытия огня для снаряда типа "Фол-кон" находится в пределах от 1 до 10 км. К другим снарядам класса "воздух - воздух", используемым на шведских истребителях-перехватчиках, относятся снаряд Rb 327 с радиолокационной полуактивной системой наведения и снаряд Rb 328 с инфракрасной пассивной системой наведения.
Сообщалось также об использовании в системе "Стрил-60" истребителя-перехватчика "Сааб-37" и о разработке для него новой системы оружия WS37, которая состоит из комплекса наземного и бортового оборудования, предназначенного специально для работы в системе ПВО "Стрил-60".
Кроме истребителей-перехватчиков, в шведской системе ПВО применяются зенитные управляемые ракеты "Бладхаунд" (английского производства, рис. 10.17) и "Эрликон" и "Кентавр-Эрликон" (собственного производства).
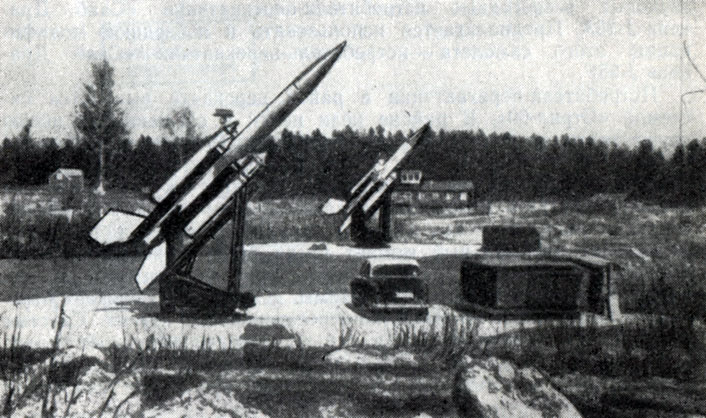
Рис. 10.17. Батарея ЗУРС 'Бладхаунд I' в системе ПВО Швеции
В соответствии с планом Министерства обороны Швеции "ÖВ62" в дальнейшем предполагается значительно расширить сеть авиабаз, больше рассредоточить активные средства, вводить на вооружение средства радиопротиводействия и постоянно модернизировать систему управления средствами ПВО.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'