Автоматика в артиллерии (Инженер-майор М. Катханов, кандидат технических наук, доцент)
Успешному решению боевых задач в зенитной, корабельной и береговой артиллерии во многом способствует автоматизация процессов стрельбы. Новейшие достижения электротехники, электроники, радиотехники и телемеханики позволили создать приборы-автоматы, осуществляющие сложные и трудоемкие вычислительные операции без непосредственного участия людей, освобождающие их от больших физических нагрузок. При этом до минимума сокращается обслуживающий персонал, уменьшается влияние субъективных факторов на точность артиллерийской стрельбы.
Одним из важнейших направлений автоматизации в артиллерии является использование специальных силовых автоматических приводов, позволяющих наводить артиллерийские системы различных калибров с большими пределами изменения скоростей и ускорений. С помощью силовых приводов энергия источника электрического питания преобразуется в механическую энергию, необходимую для наведения орудия по закону, задаваемому с командного пункта.
На основе теории автоматического регулирования удалось создать так называемый следящий силовой привод. Он позволяет использовать очень малые мощности управляющего сигнала для регулирования принципиально любых источников энергии, а также переходить от одного способа воспроизведения передаваемой величины к другому (например, от электрического напряжения к механическому перемещению).
С помощью следящих систем ведется дистанционное управление объектами (орудиями, рулями управления, приборами), находящимися на значительном удалении от командного пункта. Именно введение автоматических устройств на военных кораблях позволило согласовать действия всей корабельной артиллерии, сосредоточив управление стрельбой на центральном командном пункте. Многотонные башенные установки линкоров, крейсеров, расположенные на корабле в различных местах, могут быть в любой момент с поразительной быстротой направлены в цель простым поворотом маховичка на командирском приборе.
Схема наведения орудий при помощи силового следящего привода (рис. 44) включает в себя командирский прибор - датчик 1, расположенный на пункте управления, электрическую синхронную передачу 2, измерительный орган 3, управляющий орган 4 и исполнительный двигатель 5. Питание к такой системе подводится от источника энергии 6.
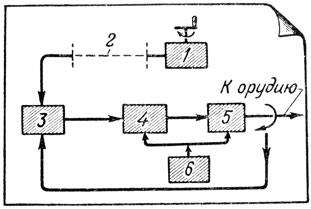
Рис. 44. Схема наведения орудия при помощи силового следящего привода
Исполнительный двигатель механически связан с механизмами наведения орудия. Измерительный орган 3 соединен с командным пунктом и валом двигателя 5. Он сравнивает заданный угол поворота датчика с положением оси канала ствола орудия и в соответствии с разностью углов вырабатывает электрический сигнал. Этот сигнал поступает в управляющий орган, где напряжение его усиливается. Затем сигнал подается к электродвигателю. Двигатель поворачивает орудие до тех пор, пока не произойдет согласования угла поворота орудия с положением датчика. Когда орудие повернется на заданный угол, напряжение, поступающее с измерительного органа, станет равным нулю, воздействие на управляющий орган прекратится и орудие остановится.
При вращении маховичка на командирском приборе благодаря системе автоматического регулирования ствол орудия будет как бы неотступно следить за его движением. Чтобы сделать такое "слежение" более эффективным, в систему автоматического управления вводится ряд дополнительных устройств, обеспечивающих быстродействие, надежность, большие пределы регулирования скорости наводки орудий, высокую точность и плавность наведения.
Естественно, что преобразование энергии, позволяющее человеку легким поворотом маховичка приводить в движение многотонные артиллерийские установки, происходит за счет потребления энергии мощных источников питания (агрегатов и электрических станций).
Впервые мысль об автоматизации наводки артиллерийских орудий зародилась в нашей стране. Первые системы дистанционного управления несколькими морскими орудиями были созданы выдающимся артиллеристом-изобретателем Алексеем Павловичем Давыдовым в 70-х годах прошлого столетия. Синхронно-следящая система Давыдова была первой в мире автоматической артиллерийской установкой. Ему же принадлежит мысль об использовании различных видов энергии для полной автоматизации процессов наводки орудий. Эти идеи русского изобретателя находят широкое применение в современной артиллерийской технике.
Автоматизация, получив первоначальное применение в корабельной и береговой артиллерии, в дальнейшем наибольшее использование нашла в зенитной артиллерии. Быстрое внедрение автоматизации именно в зенитной артиллерии обусловлено особенностями стрельбы по быстродвижущимся целям. Самолет является наиболее скоростной и маневренной целью по сравнению с другими артиллерийскими целями. Скорость перемещения современных реактивных самолетов исчисляется сотнями метров в секунду. В результате самолет в зоне обстрела зенитной артиллерии находится крайне ограниченное время. Чтобы повысить вероятность поражения такой цели, требуется произвести наибольшее число прицельных выстрелов, а следовательно, как можно быстрее рассчитать изменяющиеся в процессе стрельбы орудийные установки.
Сложность стрельбы по самолетам заключается еще и в том, что орудие должно быть наведено не в ту точку, где находится цель в момент выстрела, а туда, где, по предварительным расчетам, произойдет встреча снаряда с целью. Эта точка носит название упрежденной. Чтобы навести орудия в упрежденную точку цели, сначала определяют пространственные координаты самолета. По текущим координатам, направлению и скорости движения цели вычисляют координаты упрежденной точки. Затем уже в соответствии с координатами упрежденной точки определяют требуемое положение орудий.
Эффективность действия артиллерии достигается за счет максимального сокращения времени на производство указанных операций и автоматизации всего процесса стрельбы. Для решения этой задачи применяется комплекс приборов управления артиллерийским зенитным огнем. Как только появляется самолет в зоне обстрела, наводчики определяют текущие координаты цели. При прямой видимости цели применяются оптические приборы - визиры или дальномеры. Ночью и в туман обнаружение самолета и определение его координат производятся с помощью радиолокационной станции. Комплексное использование этих средств для определения координат обеспечивает уверенный поиск воздушной цели в различное время суток и в любую погоду.
Схема автоматического управления артиллерийским зенитным огнем показана на рис. 45.
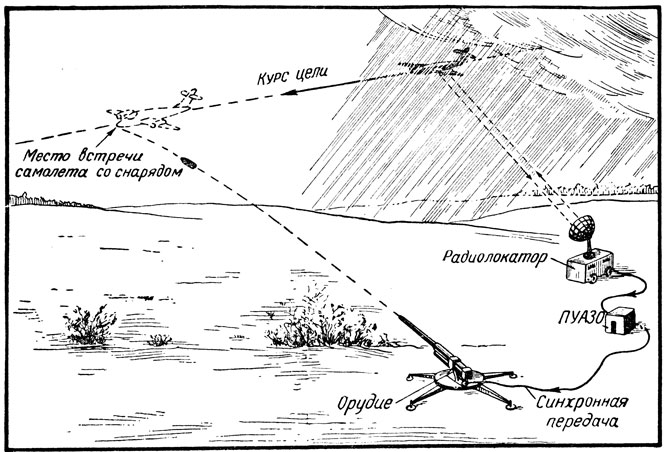
Рис. 45. Схема автоматического управления артиллерийским зенитным огнем
По отраженному от самолета сигналу, поступающему на вход следящих систем, антенна радиолокационной станции автоматически наводится на цель. В процессе слежения антенны за самолетом производится измерение текущих координат цели, которые с датчиков радиолокационной станции непрерывно передаются на линии синхронной передачи на центральный счетно-решающий прибор, получивший название прибора управления артиллерийским зенитным огнем (ПУАЗО). Современные ПУАЗО представляют собой сложную систему электромеханических и электрических устройств, с помощью которых по полученным данным определяются координаты упрежденной точки и вырабатываются установки для орудий. Решение задачи о точке встречи в ПУАЗО производится автоматически, без участия людей, благодаря применению электрических следящих систем.
Исходные орудийные установки с ПУАЗО по синхронной передаче непрерывно подаются на орудия зенитной батареи, располагаемой на некотором расстоянии от пункта управления. Для питания радиолокационной станции, синхронных передач, электрических элементов ПУАЗО, а также приводных электродвигателей на орудиях зенитный комплекс снабжается мощными источниками питания.
Основное требование, предъявляемое к системе автоматического управления зенитным огнем, - высокая точность определения исходных данных для стрельбы и их воспроизведения в механизмах наведения орудий. Степень точности всех величин должна быть не только высокой, но и одинаковой. Значительные ошибки в каком-либо одном звене сведут на нет точность остальных элементов.
Чтобы избежать субъективных ошибок, зависящих от обслуживающего персонала, особенно возрастающих при ручном наведении орудия, используются автоматически действующие от ПУАЗО силовые следящие приводы. Они устанавливаются на каждом зенитном орудии. С помощью таких приводов производится наводка орудия, автоматическая установка взрывателя и заряжание орудия. Человек при этом полностью освобожден от физической нагрузки и от участия в многочисленных счетно-вычислительных операциях.
Однако не следует думать, что применение автоматизации уменьшает роль человека. Наоборот, его роль становится более ответственной. Вместо простого исполнения трудоемких операций человек управляет сложной системой автоматических устройств и агрегатов. В связи с этим значительно повышаются требования к специальной подготовке лиц, имеющих дело с приборами управления.
Автоматизация процессов стрельбы широко внедряется не только в корабельной и зенитной артиллерии, но и в авиационном вооружении. Принимая во внимание скоротечность воздушного боя, стрелок должен действовать исключительно быстро. С ростом скоростей полета и увеличения калибра авиационного вооружения усилия, которые приходится преодолевать стрелку при наводке оружия, значительно возросли. Маневренность воздушного боя требует быстрого изменения зон обстрела, мгновенной переброски оружия в любом направлении. Все это связано с преодолением значительных скоростей и ускорений. При этом нагрузка на механизмы наведения достигает больших величин. Чтобы облегчить работу стрелка и повысить эффективность стрельбы по воздушным целям, для наведения оружия также используются силовые приводы. Стрелок воздействует на них во время прицеливания. Применение силовых следящих систем позволяет располагать оружие в месте, имеющем наивыгоднейшую зону обстрела.
Для увеличения меткости стрельбы из танка в движении необходимо обеспечить наведенному орудию устойчивое положение, независимое от колебаний танка. Решение этой задачи стало возможным благодаря использованию стабилизирующих свойств гироскопа и применению силовых следящих систем. Гироскоп в таких системах служит в качестве датчика, фиксирующего положение орудия относительно горизонта. Обладая свойством удерживать неизменным направление своей оси в пространстве, гироскоп позволяет определить угол отклонения орудия относительно горизонта во время движения танка. Снимаемый с гироскопического датчика электрический сигнал, пропорциональный углу отклонения, поступает после усиления на вход силового привода и воздействует на орудие, поворачивая его в сторону, обратную колебанию танка. В результате орудие сохраняет стабильное, приданное ему для прицельной стрельбы положение, не реагируя на колебания машины.
Проблема стабилизации вооружения с применением следящих приводов в равной степени относится к кораблям, самолетам, различного рода самоходным установкам, подверженным во время движения сильным колебаниям, затрудняющим прицельную стрельбу.
На принципах автоматизации основана также разработка управляемых на расстоянии самолетов, снарядов, кораблей. Сигналы управления, передаваемые по радио с командного пункта, улавливаются приемными устройствами, усиливаются и автоматически воздействуют на рули управления самолета или корабля, заставляя их двигаться в нужном направлении.
Применение автоматики и телемеханики в артиллерии, как и в других отраслях военной техники, непрерывно расширяется. Вооружение, имеющее автоматизированные приборы и аппаратуру, позволяет решать все более сложные боевые задачи.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'