2.2. Способы использования
Исходя из условий ведения боевых действий, то есть характера боевой задачи, применяемых средств поражения, состава и боевых возможностей своих сил, степени противодействия противника, физико-географических факторов и других условий обстановки, подводные лодки могут использоваться одиночно или в составе групп (завес, тактических групп), самостоятельно или во взаимодействии с другими силами флота (надводными силами и морокой авиацией) [13, 48].
Одиночно подводные лодки используются в тех случаях, когда в соответствии со своими боевыми возможностями и условиями обстановки они в состоянии выполнить поставленную боевую задачу.
По опыту второй мировой войны одиночно подводные лодки могут использоваться при высадке разведывательных групп на побережье противника, при ведении наблюдения у его военно-морских баз, при боевом патрулировании и нанесении ударов по наземным объектам противника, перевозке личного состава и грузов и в других случаях.
В тех случаях, когда боевые возможности одной подводной лодки не обеспечивают выполнение поставленной боевой задачи с высокой вероятностью, подводные лодки действуют в составе групп.
Группа подводных лодок - это временное тактическое формирование из двух и более подводных лодок одного или различных классов, создаваемое на период выполнения поставленной боевой задачи [13]. Группы подводных лодок в зависимости от поставленных задач могут быть разведывательно-ударными и ударными.
Разведывательно-ударная группа - это группа подводных лодок, предназначенных для разведки, обнаружения противника, слежения за ним, обеспечения наведения на него других сил и нанесения ударов по соединениям кораблей, конвоям и десантным отрядам. Она является элементом боевого порядка сил.
Ударная группа, также являясь элементом боевого порядка сил, предназначена для решения задачи по уничтожению противника в бою. Разновидностями группы подводных лодок являются завеса и тактическая группа.
Как уже отмечалось, подводные лодки Северного флота во время Великой Отечественной войны использовались с успехом в действиях по нарушению морских прибрежных коммуникаций методом нависающих завес. При этом подводные лодки выходили на курс конвоев противника для их атаки по данным наведения тактической разведки (как правило, воздушной).
Применялись в составе завес, так называемых "волчьих стай", и немецкие подводные лодки на коммуникациях союзников в Атлантике, действуя при этом из-за слабого противолодочного обеспечения союзных конвоев преимущественно в надводном положении. Однако во второй половине 1943 г. эффективность действий немецких подводных лодок в связи с развитием противолодочных сил, особенно противолодочной авиации, в составе союзных флотов значительно снизилась. Действуя в завесе в надводном положении, подводные лодки постоянно подвергались угрозе обнаружения и уничтожения авиацией противника. Усиление зенитного вооружения подводных лодок не обеспечило снижения их потерь. Подводные лодки вынуждены были уклоняться от авиации погружением на глубину, но малые скорости хода под электромоторами приводили к отставанию подводных лодок от конвоя и потере контакта с ним. В связи с усилившейся уязвимостью в надводном положении подводные лодки перешли к действиям преимущественно в подводном положении, при этом атаковывали транспорта из состава конвоев только некоторые из подводных лодок завесы, так как, находясь в подводном положении, они не успевали сблизиться с ними на дистанцию стрельбы торпедами [16].
Американцы на Тихом океане в 1943-1945 гг. довольно активно применяли групповые действия подводных лодок, при этом в связи с ограниченностью районов (преимущественно Китайское и Желтое моря) в состав групп, как правило, входили 2-3 подводные лодки. Совместные действия подводных лодок ограничивались лишь групповым поиском противника, подводные лодки действовали согласованно только до обнаружения конвоя. После этого управление подводными лодками терялось, и каждая из них действовала самостоятельно, выбирая цель и способ атаки [27].
В современных условиях завеса подводных лодок представляет собой одну из форм тактического построения (поискового или боевого порядка) группы подводных лодок при решении ими общей задачи. Регламентированное расположение и порядок согласованного маневрирования подводных лодок в завесе повышают вероятность обнаружения и атаки противника, обеспечивают достижение тактического взаимодействия и увеличивают безопасность от взаимного поражения. В зависимости от предназначения различают следующие завесы [13, 48]:
- ударные - обеспечивающие нанесение удара возможно большим числом подводных лодок;
- разведывательные - обеспечивающие высокую вероятность обнаружения противника и последующее наведение на него других сил;
- разведывательно-ударные - позволяющие оптимально сочетать решение задач разведки и последующий удар по противнику с высокой вероятностью его уничтожения.
Построение завесы включает установление координат центра завесы (ЦЗ), назначение строя завесы (фронта, пеленга, клина и обратного клина), пеленга строя Пс, расстояния между смежными подводными лодками Дл-л, глубины погружения каждой подводной лодки hл и других элементов (рис. 2.1). Согласованное маневрирование подводных лодок в завесе, достигается установлением курса завесы Кз, продолжительности галса tг, генеральной скорости Vз. ген, времени начала движения в завесе Тн. д и других элементов. Особенностью завес является отсутствие взаимной связи подводных лодок в подводном положении. Управление завесами подводных лодок, их смещение и наведение на обнаруженного противника осуществляются с командного пункта флота или с корабельного пункта управления. Имея современные гидроакустические средства наблюдения, более высокие скоростные возможности и дальноходные торпеды, подводные лодки в настоящее время могут действовать в составе завес со значительно более высокой эффективностью, чем во время второй мировой войны.
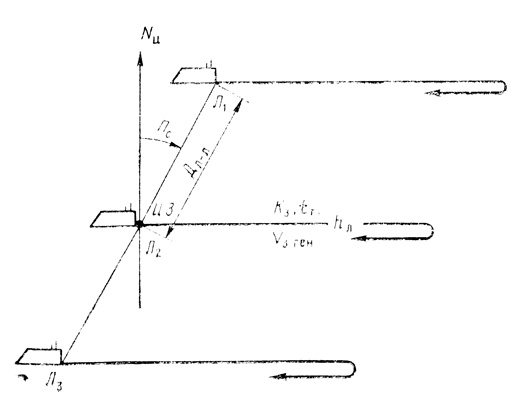
Рис. 2.1. Завеса подводных лодок
Тактическая группа подводных лодок - это временное формирование из двух-трех подводных лодок одного или различных классов, создаваемое на период выполнения боевой задачи. Тактические группы формируются из подводных лодок, находящихся в пунктах базирования или уже развернутых в определенные районы моря.
Первая попытка применить подводные лодки в составе тактической группы была предпринята на Северном флоте в феврале 1943 г. при действиях подводных лодок на коммуникациях противника. В тактическую группу вошли подводные лодки "К-3" и "К-22", поддерживавшие между собой звукоподводную связь. Однако вследствие несовершенства средств гидроакустической связи на подводных лодках эта попытка оказалась безуспешной [26]. В послевоенный период в связи с совершенствованием радиоэлектронных средств подводных лодок, в том числе и гидроакустической связи, эта форма их тактического взаимодействия получила значительное распространение в ряде флотов.
Плавание подводных лодок в составе тактических групп осуществляется в соответствии с установленными правилами совместного плавания кораблей [49].
Совместное плавание представляет собой одновременный совместный переход морем (а также и совместное боевое маневрирование) двух и более кораблей (подводных лодок) под единым командованием, совершаемый в ордерах или строях.
Ордер - это детально разработанное и строго регламентированное по направлениям и расстояниям взаимное расположение кораблей при выполнении задачи. В зависимости от этапа выполнения задачи он может быть походным или боевым [13].
Строй представляет собой простейший ордер, в котором корабли располагаются на одной или нескольких прямых линиях. Строй характеризуют следующие элементы (рис. 2.2):
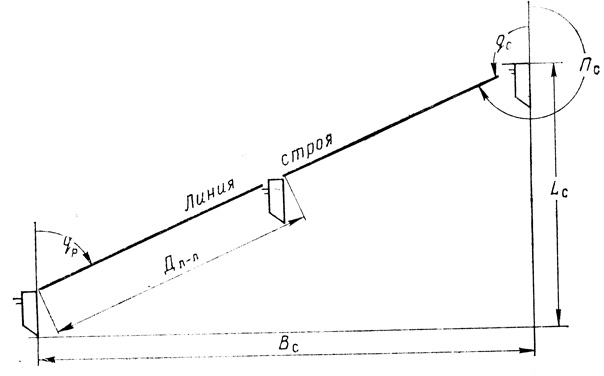
Рис. 2.2. Элементы строя
- линия строя - линия, соединяющая одинаковые точки находящихся в строю кораблей; ее направление считается от уравнителя (уравнитель - это корабль, по которому равняются остальные корабли, идущие в строю; при действиях подводных лодок в составе тактической группы уравнителем, как правило, является подводная лодка командира группы);
- пеленг строя Пс - угол между истинным меридианом и направлением линии строя;
- угол строя qc - угол между диаметральной плоскостью уравнителя и линией строя;
- угол равнения qp - угол между диаметральной плоскостью корабля и направлением на уравнитель; углы строя и равнения дополняют друг друга до 180°, они могут быть правого или левого борта;
- глубина строя Lc - расстояние от форштевня головного корабля до ахтерштевня концевого корабля по направлению, обратному направлению движения строя;
- ширина строя Вс - расстояние между наружными бортами крайних кораблей по направлению, перпендикулярному направлению движения строя;
- расстояние между кораблями в строю Дл-л - промежуток чистой воды между соседними кораблями (подводными лодками).
В простом строю все корабли располагаются на одной прямой. К простым строям относятся (рис. 2.3):
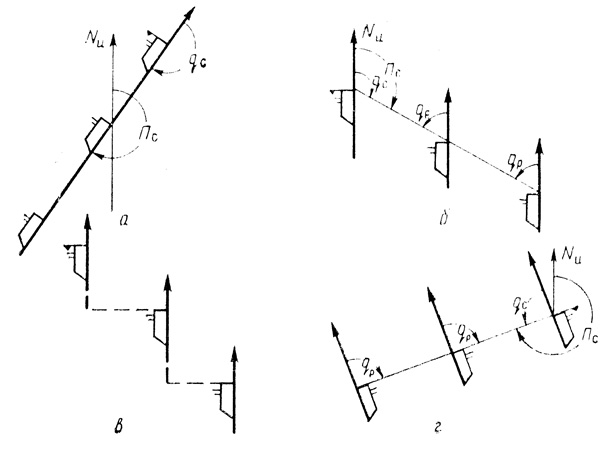
Рис. 2.3. Простые строи: а - строй кильватера; б - строй пеленга; в - строй уступа; г - строй фронта
- строй кильватера, при котором линия строя совпадает с его курсом, при этом угол строя равняется 180°, а угол равнения - 0; глубина строя имеет максимальное значение при данном числе кораблей в строю и расстоянии между ними, а ширина - минимальное, равное ширине корпуса корабля;
- старой пеленга, при котором линия строя совпадает с его заданным пеленгом (но не совпадает с его курсом, как в строю кильватера);
- строй уступа - особый сомкнутый строй, при котором последующие корабли следуют от впереди идущих кораблей на установленных по фронту и глубине расстояниях (подводными лодками применяется редко); может быть строй уступа вправо или влево;
- строй фронта, при котором линия строя перпендикулярна его курсу, при этом ширина строя имеет максимальное значение при данном числе кораблей в строю и расстоянии между ними, а глубина - минимальное, равное длине корабля; угол строя и угол равнения равны 90°, но отличаются наименованием борта (подводными лодками наиболее часто применяется при ведении поиска противника). Различают строй фронта вправо или влево (относительно уравнителя).
В сложном строю корабли располагаются на нескольких прямых линиях. Сложными строями для подводных лодок, действующих в составе тактических групп, являются строи клина и обратного клина (рис. 2.4).
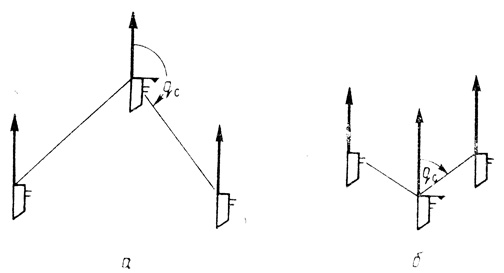
Рис. 2.4. Сложные строи: а - строй клина; б - строй обратного клина
Строй клина - это строй, в котором корабли располагаются по сторонам угла с кораблем-уравнителем в вершине; при этом в строю клина угол строя всегда больше 90°, а в строю обратного клина - меньше 90°.
При плавании в строях корабли изменяют при необходимости курс последовательным поворотом или поворотом способом "все вдруг". Существуют и другие, более сложные способы изменения курса, но они подводными лодками не применяются.
Последовательный поворот применяется только в строю кильватера, при этом первым начинает поворот головной корабль, а остальные корабли начинают поворот на новый назначенный курс с приходом в точку начала поворота головного корабля.
При изменении курса способом "все вдруг" по сигналу флагмана (командира тактической группы подводных лодок) корабли (подводные лодки группы) одновременно поворачивают в назначенную сторону на установленный угол, сохраняя свое положение относительно уравнителя, и с приходом на новый курс удерживают места в строю. Поворот может выполняться на любой угол, однако при плавании в сомкнутых строях поворот "все вдруг" более чем на 90° выполнять не рекомендуется в целях безопасности маневрирования.
Изменение вида строя без изменения его курса, а также изменение пеленга строя или расстояния в строю без изменения пеленга производятся по правилам тактического маневрирования для изменения позиции относительно уравнителя, идущего постоянными курсом и скоростью [49]. Для изменения пеленга строя (рис. 2.5) через точку Л20, нахождения уравнителя (подводной лодки командира тактической группы) проводится новый назначенный пеленг строя П1, по нему от уравнителя откладываются назначенные ранее расстояния между кораблями Д0, в результате чего находятся новые позиции подводных лодок Л1 и Л3 относительно подводной лодки командира группы. Линии, соединяющие старые и новые позиции подводных лодок Л10Л1 и Л30Л3, являются линиями их относительного движения для изменения позиции. Из новых позиций подводных лодок проводится курс уравнителя Ктг, по нему откладывается вектор его скорости Vл2. Из конца этого вектора вектором скорости подводной лодки при изменении позиции Vл1 (Vл3) делается засечка на линии относительного движения. При этом направление вектора скорости маневрирующей подводной лодки из точки засечки дает курс подводной лодки Кл1 (Кл3) Для изменения пеленга строя. Аналогично осуществляется построение для изменения расстояния между подводными лодками без изменения пеленга строя (рис. 2.6) и для изменения как пеленга строя, так и расстояния между подводными лодками (рис. 2.7).
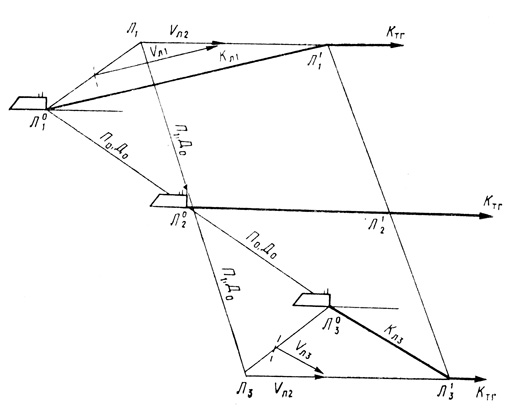
Рис. 2.5. Расчет маневра для изменения пеленга строя тактической группы подводных лодок
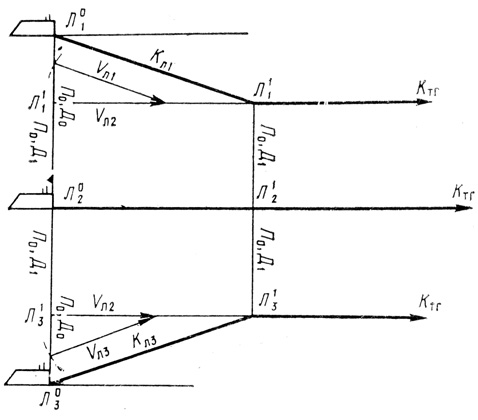
Рис. 2.6. Расчет маневра для изменения расстояния между подводными лодками тактической группы
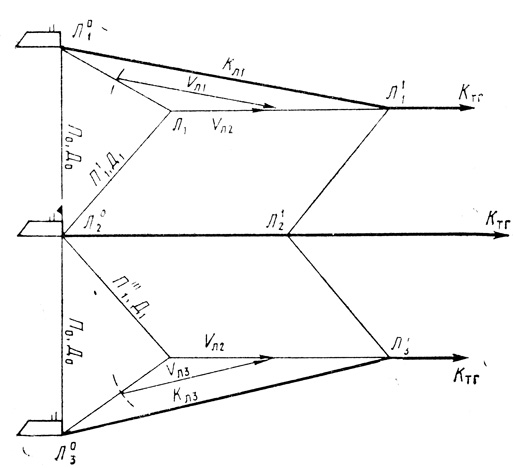
Рис. 2.7. Расчет маневра для изменения пеленга строя и расстояния между подводными лодками тактической группы
В тактической группе подводные лодки действуют в подводном положении в строю, обеспечивающем их взаимное наблюдение гидроакустическими средствами, непрерывную звукоподводную связь, безопасное маневрирование, надежное управление и эффективное применение оружия [48]. При использовании звукоподводной связи в тактической группе (а также и при действиях подводных лодок в разнородных поисково-ударных группах совместно с надводными кораблями) необходимо учитывать следующие факторы:
- возможность обнаружения, пеленгования и перехвата передач противником;
- относительно малую скорость передачи в связи с незначительной скоростью распространения звука в воде;
- ограниченные дальности связи;
- резкое уменьшение дальности связи с увеличением скорости подводной лодки в связи с возрастанием собственных помех станциям звукоподводной связи;
- зависимость надежности связи от гидроакустических условий в данном районе моря и глубины погружения подводных лодок.
Управление подводными лодками, входящими в состав тактической группы, осуществляется ее командиром, находящимся на одной из подводных лодок, а управление тактической группой в целом - с командного пункта флота или корабельного пункта управления.
При формировании тактических групп в море следует учитывать, что, прибыв в точку встречи, подводные лодки из-за ошибок в счислении своего места и ограниченности дальности действия средств наблюдения могут не обнаружить друг друга (также и при формировании разнородных ударных или поисково-ударных групп совместно с надводными кораблями). В этом случае им необходимо осуществлять взаимный поиск друг друга в течение определенного времени [56]. При этом подводная лодка, находясь в подводном положении, не всегда может уточнить свои координаты и соответствие их назначенной точке встречи. Для организации встречи командование определяет и передает на подводные лодки следующие данные: координаты, размеры и конфигурацию района встречи; глубины погружения и направления подхода подводных лодок к его центру; характер маневрирования и время взаимного поиска в случае необнаружения друг друга с прибытием в центр района встречи. Одним из способов маневрирования при взаимном поиске подводных лодок в назначенном районе встречи может быть маневрирование по расходящемуся квадрату из назначенной точки встречи О (рис. 2.8). При этом длина первого поискового галса lг1 должна быть равна дальности действия средств наблюдения подводной лодки dл, а длина каждого последующего галса увеличивается на ту же величину, то есть lг(n) = ndл, где n - номер галса. Для обеспечения сплошного обследования района расстояние между галсами принимается равным 2dл. Направление первого галса соответствует назначенному курсу подхода подводных лодок к центру района встречи, а каждого последующего изменяется на 90° в одну и ту же заранее обусловленную сторону. Подводные лодки подходят к точке встречи контркурсами каждая на своей назначенной глубине погружения h1 и h2. Время лежания обеих подводных лодок на каждом поисковом галсе должно быть одинаковым, а длина галса зависит от их скоростей, назначенных командным пунктом, организующим встречу. При этом время лежания каждой из подводных лодок на каждом частном n-м галсе будет
где Vp = Vл1 + Vл2 - относительная скорость подводных лодок, поскольку они при взаимном поиске всегда двигаются контркурсами.
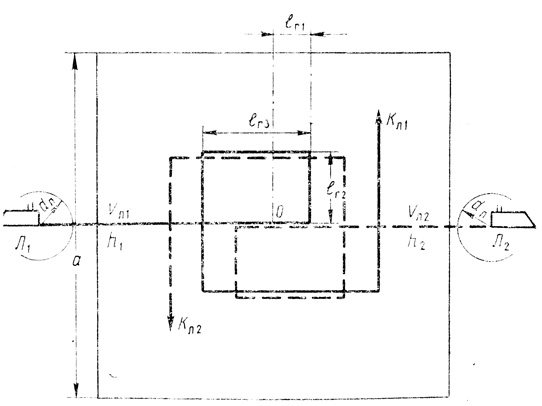
Рис. 2.8. Маневрирование подводных лодок при взаимном поиске в назначенном районе встречи: О - точка встречи; Кл1 и Кл2 - курсы подводных лодок Л1 и Л2 соответственно
Время взаимного поиска для обнаружения подводными лодками друг друга рассчитывается по формулам теории вероятностей в зависимости от дальности действия средств обнаружения подводных лодок (наибольшей из двух дальностей, так как при обнаружении хотя бы одной подводной лодкой другой подводной лодки встреча считается состоявшейся - будет произведено гидроакустическое опознавание и установлена связь), назначенных скоростей хода при поиске, возможных ошибок в счислении места и заданной вероятности встречи (как правило, не менее 90%). Так, например, для обеспечения встречи с такой вероятностью время взаимного поиска подводными лодками друг друга при скорости одной из них 8 уз, а другой 10 уз, дальности взаимного обнаружения 5 миль, исходной суммарной ошибке в местах подводных лодок в момент их прибытия в центр района встречи 10 миль составит 3,0-3,3 ч. Размеры района встречи (квадрат со стороной а) определяются, исходя из назначенных скоростей хода подводных лодок и отведенного времени для взаимного поиска Тп, по формуле а = √(2dлVρТп).
Подводные лодки в зависимости от их вооружения могут сближаться с противником на дальность действия своего оружия и применять его по данным собственных средств наблюдения или по данным внешних источников целеуказания в тех случаях, когда дальность стрельбы основным оружием превосходит дальность действия собственных средств наблюдения. Это прежде всего относится к подводным лодкам с крылатыми ракетами.
Кроме рассмотренных способов боевого использования подводных лодок при ведении ими боевых действий в ВМС ряда стран применяется в мирное время боевое патрулирование подводных лодок [13, 48].
Боевое патрулирование подводных лодок - это метод использования их, обеспечивающий постоянную высокую готовность к нанесению удара по противнику или выполнению атаки. Оно заключается в непрерывном маневрировании подводных лодок в назначенных районах океана (моря) или по указанным маршрутам произвольными курсами, малошумными скоростями, на глубинах, обеспечивающих наибольшую скрытность действий подводных лодок, наблюдение за обстановкой и своевременное получение информации с командного пункта. Районы и маршруты боевого патрулирования подводных лодок выбираются в пределах досягаемости их оружия до назначенных для поражения объектов, вне зон эффективной противолодочной обороны противника, оживленного судоходства и морского промысла. При патрулировании подводные лодки поддерживают установленную готовность к применению оружия с получением приказа.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'