6.2. Боевые действия против подводных лодок
Борьба с подводными лодками является одним из видов военных действий на море, заключающимся в поиске и уничтожении подводных лодок противника в целях предотвращения их ракетных и торпедных ударов по наземным и береговым объектам, кораблям и судам в море и в базах, воспрепятствования ведению ими разведки, постановки мин и решения других задач [48]. К решению задачи борьбы с подводными лодками подводные лодки привлекались еще в период второй мировой и Великой Отечественной войн [59]. Так, например, из общего числа погибших итальянских подводных лодок на Средиземном море 24% потоплено английскими подводными лодками, а из общего числа японских подводных лодок, потопленных на Тихом океане, 19% приходится на долю американских подводных лодок. Потери немецких подводных лодок во время войны от подводных лодок противника составили 25 единиц, или около 3% общего числа уничтоженных подводных лодок.
Получили опыт действий против подводных лодок противника во время Великой Отечественной войны и советские подводные лодки. Например, подводная лодка "М-176" (командир - капитан-лейтенант И. Л. Бондаревич) провела 28 мая 1942 г. длительный подводный бой с подводной лодкой ВМС фашистской Германии. В августе 1943 г. подводная лодка "С-101" (командир - капитан-лейтенант Е. Н. Трофимов, командир дивизиона - капитан 3 ранга П. И. Егоров) потопила в Карском море трехторпедным залпом с перископной глубины подводную лодку "U-639".
Однако общая эффективность борьбы с подводными лодками была невысокой из-за несовершенства гидроакустических средств, торпед и самих подводных лодок. За всю вторую мировую войну только 80 подводных лодок, то есть 7% всех уничтоженных, приходится на долю подводных лодок.
В послевоенное время с внедрением на подводных лодках ядерной энергетики и оснащением их ракетно-ядерным оружием борьба с ними приобрела общегосударственное значение и стала одной из главных задач военных флотов. Угроза, которую представляют современные подводные лодки, особенно носители ракетно-ядерного оружия, вызвала необходимость создания комплекса специальных противолодочных сил: надводных кораблей различных типов, подводных лодок, самолетов и вертолетов. Благодаря научно-технической революции в военном деле многоцелевые атомные подводные лодки, вооруженные гидроакустическими комплексами и современным противолодочным оружием, стали одной из главных сил в борьбе с подводным противником. Главное преимущество противолодочных подводных лодок перед противолодочными надводными кораблями-их высокая скрытность. С увеличением глубины погружения увеличивается скорость начала кавитации, а следовательно, подводная лодка может идти с большей скоростью, не нарушая скрытности. Пониженная шумность при оптимальной скорости хода, способность погружаться на большие глубины, эффективность средств обнаружения и поражения - характерные особенности противолодочных подводных лодок.
Подводные лодки в общей системе противолодочных мероприятий возможно использовать для решения следующих задач [53]:
- борьбы с подводными лодками противника на выходах из баз, на маршрутах перехода и в районах боевых действий, а также в районах боевых действий своих надводных кораблей и на маршрутах переходов своих ПЛАРБ;
- постановки активных противолодочных минных заграждений;
- ведения разведки в интересах выполнения противолодочных задач.
При решении этих задач, по данным зарубежной печати, атомные многоцелевые подводные лодки могут использоваться одиночно и группами, самостоятельно и во взаимодействии с противолодочными кораблями, противолодочными самолетами и вертолетами.
Они могут также взаимодействовать с авианосными поисково-ударными группами (АПУГ), участвовать в противолодочном охранении крупных надводных кораблей, главным образом авианосцев, а также предварительно обследовать районы их боевого маневрирования.
Для того чтобы воспрепятствовать выходу подводных лодок противника в районы боевых действий, по мнению зарубежных военных специалистов, на ближних подходах к его базам в заранее назначенных районах должно быть организовано патрулирование (дежурство) противолодочных подводных лодок. Величина и конфигурация этих районов определяются в зависимости от ширины предполагаемой полосы движения подводных лодок противника и числа своих подводных лодок, привлекаемых к решению данной задачи. Учитываются также местные географические условия и тактическая обстановка. Поиск подводных лодок противника на подходах к его базам осуществляется в секторах наиболее вероятных курсов выхода подводных лодок, определяемых с учетом глубин моря в данном районе и других навигационных факторов. Поиск ведется путем маневрирования на глубинах погружения, обеспечивающих наибольшую дальность обнаружения противника и скрытность от его средств наблюдения, и на небольших скоростях хода с целью обеспечить преимущество в дальности обнаружения перед подводной лодкой противника, при этом оптимальная поисковая скорость находится в пределах от 5 до 15 уз. С увеличением поисковой скорости увеличиваются размеры обследуемой площади, но возрастают собственные шумы и помехи гидроакустическому комплексу, понижается скрытность действий. При появлений противолодочных сил противника противолодочная подводная лодка, ведущая поиск, уклоняется от обнаружения выходом из полосы поиска. Если уклониться от обнаружения не удалось, то применяется маневр отрыва резким изменением курса, скорости хода и глубины погружения с одновременным использованием средств гидроакустического подавления. Эффективность действий противолодочных подводных лодок на выходах из военно-морских баз противника повышается при использовании ими данных об обстановке от других сил разведки.
При использовании для поиска нескольких подводных лодок в целях исключения взаимных помех и предотвращения атак своих подводных лодок каждая подводная лодка должна маневрировать только в пределах своего района, а между смежными районами назначаются разграничительные полосы. Поиск ведется с использованием гидроакустического комплекса в пассивных режимах, активный режим используется только перед залпом для уточнения дистанции до атакуемой цели.
При организации борьбы с подводными лодками на маршрутах перехода особое внимание уделяется заблаговременному созданию противолодочных рубежей, важнейшим компонентом которых считаются подводные лодки. Каждая подводная лодка будет решать задачи поиска и уничтожения подводных лодок противника в пределах заданного ей района, а сами районы должны располагаться в наиболее глубоководной и узкой части пролива, если противолодочный рубеж создается в проливе. При этом каждой подводной лодке нарезается участок с учетом ее поисковой производительности (см. разд. 4.2). Как правило, для подводных лодок типа "Лос-Анджелес" назначаются участки размером не менее 60×60 миль.
На противолодочных рубежах большой протяженности и глубины может быть применена тактика совместных действий атомных многоцелевых подводных лодок с противолодочными надводными кораблями и противолодочной авиацией. Создаются смешанные поисково-ударные группы, в составе которых подводные лодки, по мнению зарубежных специалистов, используются в основном для первичного обнаружения ракетных подводных лодок противника и наведения на них противолодочных кораблей, самолетов и вертолетов. В благоприятных условиях и сами подводные лодки могут атаковать ракетные подводные лодки. Однако при этом способе противолодочных действий необходимо иметь превосходство в воздухе в данном районе и надежную связь в направлении подводная лодка - противолодочный корабль.
Организация боевого обеспечения ракетных подводных лодок противолодочными подводными лодками предусматривает поиск подводных лодок по маршруту перехода своих ПЛАРБ в назначенный им район боевого патрулирования и на подходах к нему. В мирное время поиск противолодочными подводными лодками ведется для обеспечения уклонения своих ПЛАРБ от обнаружения и отрыва от слежения, если оно выявлено, а в военное время поиск осуществляется в целях уничтожения обнаруженных подводных лодок. По взглядам зарубежных военно-морских специалистов, возможно также использование многоцелевых подводных лодок для имитации ПЛАРБ с целью отвлечь противолодочные силы на ложные направления.
При организации противолодочного обеспечения авианосных соединений и отрядов боевых кораблей одним из вариантов использования многоцелевых атомных подводных лодок является предварительное обследование районов предстоящих боевых действий в целях уничтожения или вытеснения из них подводных лодок противника. При этом противолодочные подводные лодки развертываются на подходах к районам предстоящих боевых действий с наиболее опасных от подводной угрозы направлений. Аналогично предполагается использовать подводные лодки для противолодочного обеспечения крупных конвоев.
Для противолодочной обороны соединений боевых кораблей и конвоев на переходе морем многоцелевые подводные лодки планируется использовать в подвижных завесах, располагаемых впереди по курсу или на флангах охраняемых объектов. В интересах противолодочного обеспечения ПЛАРБ, авианосных ударных соединений и конвоев многоцелевые подводные лодки могут также привлекаться для скрытной постановки противолодочных мин.
Учитывая возросшие боевые возможности атомных многоцелевых подводных лодок, зарубежные военно-морские специалисты считают целесообразным использовать их для подводного эскорта отрядов боевых кораблей и конвоев путем создания смешанного охранения, состоящего из подводных лодок и надводных противолодочных кораблей. Участвуя в противолодочной обороне авианосных соединений, многоцелевые атомные подводные лодки могут вести поиск подводных лодок на больших удалениях от них, а также периодически проверять в мирное время возможное слежение за авианосцами со стороны подводных лодок. Для этого подводная лодка с назначенной периодичностью занимает позицию на кормовых курсовых углах своего соединения надводных кораблей и в течение назначенного времени обследует водную среду с помощью гидроакустического комплекса для обнаружения следящей за авианосцем подводной лодки. В случае ее обнаружения она непосредственно или через корабль-ретранслятор доносит об этом командиру соединения, который предпринимает маневр для отрыва от слежения резким изменением курса и увеличением скорости.
При совместных действиях многоцелевых подводных лодок с противолодочными кораблями и противолодочной авиацией из-за отсутствия надежной тактической связи возникает опасность поражения подводной лодки своими взаимодействующими силами. В таких случаях эти разнородные силы будут действовать в различных районах с назначением между ними разграничительных полос такой ширины, которая превышала бы суммарные погрешности в определении своих мест и исключала полеты авиации над районами действий своих подводных лодок, а также вход в них противолодочных кораблей без предварительного оповещения. В общем случае при действиях разнородных поисково-ударных групп позиции подводных лодок назначаются во внешней полосе со стороны наиболее вероятного подхода подводных лодок противника, что вызывается превышением дальности действия средств обнаружения подводных лодок по сравнению с надводными кораблями и скрытностью подводных лодок.
Одной из главных задач многоцелевых подводных лодок в мирное время, по взглядам зарубежных специалистов, является постоянное слежение за атомными подводными лодками с баллистическими ракетами с задачей уничтожения их с началом военных действий. Для наведения многоцелевых подводных лодок на подводные лодки используются системы дальнего гидроакустического наблюдения, противолодочная авиация, космические, радиоразведывательные и другие средства обнаружения и классификации подводных лодок.
При всех способах использования подводных лодок для поиска подводных лодок противника необходимо обеспечить высокую его эффективность, для чего следует не только правильно определить расположение и размеры района поиска, наряд выделенных сил исходя из потребностей и возможностей, но и выбрать оптимальные в данных тактических условиях способы поиска и характер маневрирования. Как известно, эффективность поиска определяется поисковой производительностью (или поисковым потенциалом) сил, ведущих поиск. Для обеспечения максимальной поисковой производительности подводная лодка должна выбрать оптимальную глубину погружения, исходя из гидроакустических условий, скорость при поиске, обеспечивающую наибольшую дальность обнаружения подводных лодок и достаточно высокую скрытность при ведении поиска. При этом в зависимости от соотношения дальности действия своих средств обнаружения и противника подводные лодки ведут непрерывный (на постоянной скорости) или дискретный поиск (на переменных скоростях). Характер маневрирования по курсу определяется условиями решения поставленной задачи или непосредственно боевым распоряжением: в заданном районе, на назначенном рубеже или в заданной полосе.
С обнаружением цели подводная лодка классифицирует ее по различным гидроакустическим (спектр и тональность шума, частота вращения винтов, шум от работы вспомогательных механизмов, главного турбозубчатого агрегата - для атомных подводных лодок) и тактическим признакам (район обнаружения, характер действий и т. д.). После классификации цели как атомной ракетной подводной лодки за ней устанавливается слежение, которое по возможности должно быть максимально скрытным и надежным. Скрытность и надежность слежения обеспечиваются прежде всего возможностями средств гидроакустического наблюдения, правильным выбором позиции слежения, а также своевременностью обнаружения маневра отслеживаемой подводной лодки, точностью определения ее координат и элементов движения. При невозможности скрытного слежения подводная лодка переходит на нескрытное с использованием активных гидроакустических средств наблюдения. В зависимости от скорости объекта слежения, а следовательно, и скорости следящей подводной лодки ее позиция должна обеспечивать надежное поддержание контакта и безопасность плавания. При выполнении целью маневра отрыва от слежения, в том числе с использованием средств гидроакустического подавления, следящая подводная лодка классифицирует контакты с целями, стремясь выделить из них ложные, и маневрирует для восстановления контакта с подводной лодкой противника в точке потери контакта или в секторе возможных курсов ее уклонения (см. разд. 4.3). Кроме того, для восстановления контакта с объектом слежения может быть применен поиск по спирали [50]. При этом расчеты частных галсов поиска и точек поворота выполняются следующим способом (рис. 6.1):
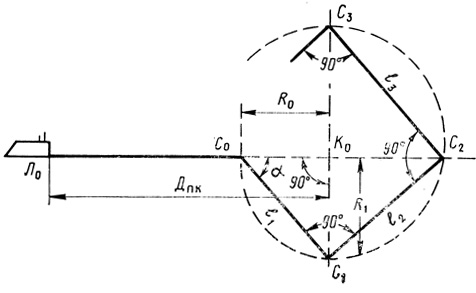
Рис. 6.1. Расчет маневрирования подводной лодки при поиске по спирали для восстановления контакта
- вычисляется длина радиуса-вектора R0 начальной точки поиска С0 по формуле

- от точки потери контакта К0 откладывается радиус-вектор R0 в направлении своей подводной лодки и наносится точка начала поиска С0;
- вычисляется длина радиуса-вектора R1 спирали, соответствующая его повороту на 90°, по формуле

- отложив R1 от точки потери контакта в направлении, перпендикулярном радиусу-вектору R0, получим точку C1 поворота на следующий галс l2 (направление и величину первого галса определит отрезок C0C1); направление каждого последующего галса отличается от предыдущего на 90° вокруг точки потери контакта, а величина определяется пересечением линии галса с продолжением линии С0К0 или С1К0 соответственно.
Таким образом, прибыв максимальной малошумной скоростью в точку начала поиска С0, подводная лодка снижает скорость до величины, обеспечивающей максимальную дальность обнаружения объекта слежения и, произведя обследование водной среды с помощью гидроакустических средств наблюдения и не обнаружив цели, следует максимальной малошумной скоростью в точку С1, где, снизив скорость, производит очередное обследование горизонта, и так далее до восстановления контакта с целью или до истечения заранее установленного времени восстановления контакта.
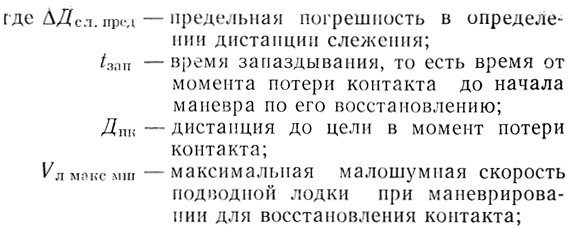
В ходе слежения для исключения потери контакта или во избежание столкновения с целью подводная лодка должна регулярно контролировать дистанцию до нее с определенной периодичностью в зависимости от дистанции слежения, скорости цели и погрешностей в их определении. При скрытном слежении с использованием пассивных гидроакустических средств уточнение дистанции до объекта слежения может быть произведено одним из следующих способов [49]: с изменением борта слежения, то есть с пересечением курса цели у нее по корме или без пересечения курса, оставаясь на прежнем борту цели, но изменив позицию слежения по пеленгу, или методом фиктивного пеленга. В обоих случаях необходимо добиться существенного (25-30°) изменения пеленга на цель для определения дистанции до нее с достаточной точностью.
В первом случае (рис. 6.2), рассчитав маневр для перемены позиции слежения с изменением борта слежения, на карте (планшете) проводят пеленг П0 на цель в момент начала маневра. В момент окончания маневра проводят пеленг П1 на цель и между пеленгами вмещают отрезок К0К1, равный пройденному целью пути за время маневра, параллельно ее курсу. Точка K1 определит место цели в момент окончания маневра.
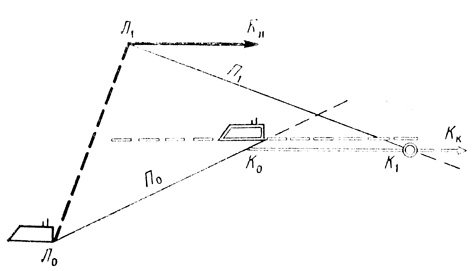
Рис. 6.2. Маневрирование подводной лодки для уточнения дистанции до объекта слежения с пересечением его курса
Во втором случае (рис. 6.3), добившись постоянства пеленга на цель, то есть, уравняв скорости движения, определяют и прокладывают на карте (планшете) пеленг П0, после чего увеличивают скорость до величины, обеспечивающей поддержание контакта с целью, выполнение маневра в короткое время и сохранение собственной скрытности. Добившись изменения пеленга на цель на величину 25-30°, подводная лодка снижает скорость до прежней и определяет пеленг П1 в момент окончания маневра. Из точки начала маневра Л0 откладывают отрезок Л0Л11, равный пути подводной лодки за время маневра, если бы она шла прежней скоростью, обеспечивающей постоянство пеленга. Из точки Л11 проводят прямую, так называемый фиктивный пеленг, параллельную начальному пеленгу П0, до пересечения с пеленгом П1. Точка К1 определит место цели (а следовательно, и дистанцию до нее) в момент окончания маневра.
Рис. 6.3. Уточнение дистанции до объекта слежения методом фиктивного пеленга
В ходе слежения доносят с назначенной периодичностью на командный пункт о координатах и действиях подводной лодки противника, периодически всплывая для этого на перископную глубину, рискуя потерять контакт с целью в связи с характером гидроакустических условий, особенно при нахождении подводной лодки противника ниже горизонта слоя скачка скорости звука. В ходе слежения подводная лодка находится в постоянной высокой готовности к применению оружия с получением приказания, а также имеет в готовности средства гидроакустического подавления на случай внезапного применения противником противолодочного оружия. С получением сигнала о начале военных действий (приказания о применении оружия) атакует противника. Атака из положения слежения может быть наиболее эффективной, так как в ходе слежения цель уже окончательно классифицирована, определены ее элементы движения и дистанция до нее, а следовательно, и исходные данные для стрельбы противолодочным оружием. Наиболее сложно выполнение атаки по подводной лодке противника при обнаружении ее в ходе поиска в условиях начавшихся военных действий. В этом случае необходимо в кратчайшее время правильно классифицировать обнаруженную цель, определить с достаточной точностью для стрельбы ее координаты, а при возможности и элементы движения, привести противолодочное оружие в готовность к стрельбе и произвести залп по противнику.
Все это требует от командира подводной лодки, вахтенных офицеров, личного состава, обслуживающего посты гидроакустического наблюдения и системы противолодочного оружия, всего личного состава высокой бдительности и профессиональной подготовки.
При ведении боевых действий против подводных лодок необходимо не только знать и учитывать их боевые возможности, организацию боевого использования и тактические приемы уклонения от противолодочных подводных лодок, но и знать тактические приемы поиска подводных лодок, слежения за ними и применения оружия по ним с началом военных действий. Кроме того, в ходе выполнения противолодочных задач необходимо знать и правильно учитывать влияние физико-географических факторов.
Так, малые глубины моря в районе поиска снижают возможность иметь повышенные, но малошумные поисковые скорости. Течения существенно влияют на точность знания места подводной лодки в ходе поиска, что вынуждает противолодочную подводную лодку чаще всплывать на перископную глубину для определения места, снижая тем самым скрытность ведения поиска. Сильное волнение и облачность в районе боевых действий влияют на возможность и точность определения своего места, а волнение, кроме того, и на дальность действия средств гидроакустического наблюдения, размывает кильватерный след объекта поиска. В целом штормовая погода не является благоприятной для противолодочных подводных лодок, так как скрытность подводных лодок повышается, а возможности обнаружения их ухудшаются.
В арктических районах торошение льдов у кромки ледового поля создает помехи гидроакустическому наблюдению, ледовый покров затрудняет использование оружия противолодочными подводными лодками и возможность взаимодействия с другими противолодочными силами.
Свечение воды демаскирует подводную лодку при плавании в темное время суток на перископной глубине, а цветение моря и наличие планктона уменьшают прозрачность воды и создают благоприятные условия для скрытности противолодочных подводных лодок от обнаружения с воздуха визуально и оптическими средствами. Наличие шумов и излучений биологического происхождения затрудняет ведение гидроакустического наблюдения и правильную классификацию объектов.
Критериями оценки эффективности противолодочных действий подводных лодок в мирное время являются вероятность обнаружения подводных лодок противника и вероятность длительного слежения за ними (см. разд. 4.2, 4.3).
Критерием оценки эффективности действий каждой противолодочной подводной лодки в военное время является вероятность уничтожения подводной лодки противника, а в более широком плане, например при действиях группы подводных лодок в обширном районе или в целом на данном театре военных действий, - математическое ожидание числа уничтоженных подводных лодок противника.
Действия подводных лодок против подводных лодок являются сложным процессом, состоящим из ряда событий, каждое из которых может состояться (или не состояться) с определенной вероятностью. Они включают поиск, длительное слежение за обнаруженной подводной лодкой, получение сигнала о начале военных действий и поражение противника своим оружием с учетом боевой устойчивости противолодочной подводной лодки (неуничтожения ее противником до применения ею своего оружия, откуда вытекает необходимость борьбы за первый залп), а также противодействие оружию со стороны противника, например применение средств гидроакустического подавления.
Эффективность боевых действий подводной лодки против подводной лодки в определенном районе оценивается вероятностью уничтожения Рунл и может быть рассчитана (в соответствии с теоремой умножения вероятностей) по формуле
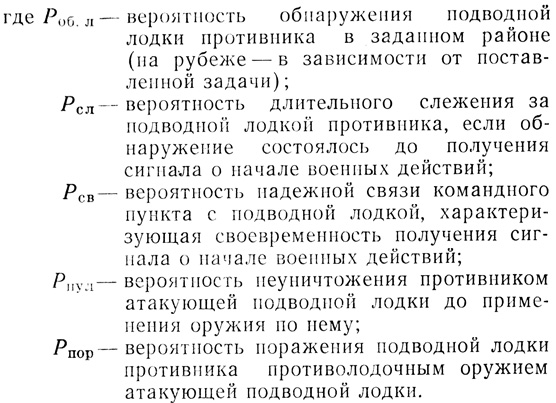
Важно максимально повышать эффективность каждого из перечисленных выше событий. Так, если принять вероятность каждого отдельного события равной 0,9, что по отношению к каждой частной задаче (например, поиск или поражение) можно считать достаточно высокой, то в результате эффективность действий подводной лодки, то есть вероятность уничтожения подводной лодки противника, получим всего
Отсюда вытекает необходимость добиваться наибольшей эффективности действий на каждом этапе, так как то, что потеряно на одном этапе действий, не может быть восполнено на последующих.
Повышение надежности связи, а следовательно, и вероятности получения приказания на применение оружия, достигается различными организационно-техническими мероприятиями, в том числе соблюдением назначенной подводной лодке периодичности всплытия для связи с командным пунктом.
Высокая боевая устойчивость противолодочной подводной лодки, то есть вероятность ее неуничтожения обеспечивается соблюдением скрытности действий, высокой готовности к применению средств гидроакустического подавления, а также оружия на самооборону.
Высокая вероятность поражения противника достигается за счет знания с большой точностью его координат и элементов движения, применением дальноходного (дальнобойного) скоростного ядерного и самонаводящегося противолодочного оружия, а также высокой выучкой личного состава и его морально-боевыми качествами.
Таким образом, поиск ПЛАРБ противника, длительное слежение за ними в мирное время в готовности к их уничтожению по приказанию с началом военных действий в целях срыва или максимального ослабления ракетно-ядерных ударов из-под воды по наземным объектам с морских и океанских направлений являются важнейшими задачами многоцелевых (противолодочных) подводных лодок. Современные многоцелевые подводные лодки по своим тактическим свойствам и боевым возможностям способны успешно вести борьбу с ПЛАРБ противника, а уровень развития тактических приемов их действий при ведении этой борьбы и подготовленность экипажей подводных лодок обеспечивают реализацию высоких боевых возможностей кораблей и оружия.
С началом боевых действий решение задачи успешной борьбы за первый упреждающий и надежный залп противолодочным оружием, имеющей решающее значение для противолодочной подводной лодки, может быть обеспечено наличием у командиров подводных лодок и вахтенных офицеров высоких волевых качеств, решительности, тактической грамотности и твердых командных навыков, а также содержанием оружия и технических средств подводной лодки в исправном состоянии, высокой выучкой и морально-боевыми качествами всего личного состава.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'