§ 2. Машина AN/FST-1 (система SDV)
Машина типа AN/FST-1 съема и обработки радиолокационных данных, называемая системой замедленного съема видеосигналов SDV, была предложена в 1951 г. Кэмбриджским исследовательским центром ВВС США. Опытные образцы были разработаны лабораторией Линкольна Массачусетского технологического института, изготовление осуществлялось фирмой "Левит Маньюфекчуринг Корпорейшн".
Эта система, называемая иначе системой сужения спектра видеосигнала, разбивает радиолокационное изображение на элементарные участки: элементы дальности и элементы азимута (рис. 3.1). В результате поверхность экрана индикатора кругового обзора, как и площадь, охватываемая радиолокационной станцией, делится на большое количество элементарных участков. Система SDV предусматривает разбивку изображения на экране индикатора на 256 элементов азимута, каждый из которых представляет собой сектор шириной приблизительно 1,4°, что почти равно ширине луча радиолокатора небольшой дальности действия. Каждый элемент азимута разбивается по длине радиуса экрана кругами дальности на 64 элемента дальности. Таким образом, все изображение оказывается разбитым на 16 384 элементарных участка, каждый из которых имеет ширину приблизительно 1,4° и длину, равную 1/64 максимальной дальности радиолокатора. Выбор таких чисел, как 256 и 64, обусловлен тем, что они являются степенями числа 2, операции с которыми удобно производить в цифровых машинах.
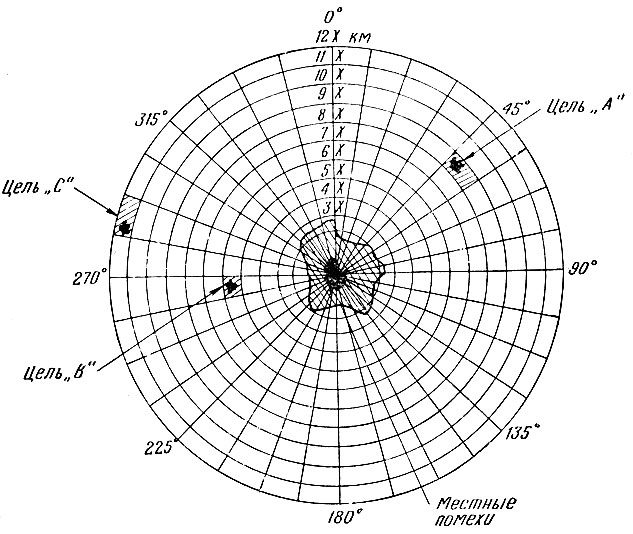
Рис. 3.1. РазбиЕка радиолокационного изображения воздушной обстановки на экране индикатора на элементарные участки дальности и азимута (квантование)
Если при этом предположить, что антенна РЛС вращается со скоростью примерно 5 об/мин, то на экране будет индицироваться 81 920 элементарных участков в минуту или 1365 элементарных участков в секунду. Передача такого числа двоичных знаков в секунду по обыкновенной телефонной линии или по радио затруднительна, а при больших скоростях вращения антенны вообще невозможна.
Причиной того, что первичная радиолокационная информация содержит такие высокочастотные составляющие, является наличие большого количества ложных сигналов, не соответствующих количеству целей в пространстве. Следовательно, первичное изображение имеет избыточную информацию, которую необходимо отфильтровать.
Основной задачей любой системы съема и обработки данных является установить, имеется цель или нет, причем это должно быть сделано машиной не хуже, чем оператором.
Эта задача в системе SDV выполняется при помощи накопительной электронно-лучевой трубки и двух ограничительных устройств, установленных на входе и выходе накопительной трубки. В качестве накопительной трубки используется электроннолучевая трубка с барьерной сеткой типа "Радекон". В этой накопительной трубке используется растр из 256 точек, каждая из которых может соответствовать одному элементу дальности. Растр этой трубки рассчитан на систему, в которой весь диапазон дальности разбивается на 256 элементов, в системе же SDV, как уже указывалось, в настоящее время используется только 64 элемента дальности. Каждая точка растра такой трубки может накапливать заряд в течение ряда записывающих операций.
Благодаря наличию первого ограничителя на входе накопительной трубки на ее экран попадают не все видеоимпульсы, а только те, амплитуда которых превышает заранее установленный порог ограничения. Схема устроена так, что если величина входного сигнала достаточна, то он проходит ограничитель и запускает триггер, момент опрокидывания которого всегда совпадает с определенной меткой дальности, выданной имеющимся в системе генератором маркерных меток дальности, отмечающих границы элементов дальности на накопительной трубке. Импульс метки дальности, совпавший с импульсом сработавшего триггера, используется для возвращения последнего в исходное состояние и записи стандартного единичного заряда в соответствующей точке растра накопительной трубки.
Известно, что за время облучения цели радиолокатором на нее попадает и затем отражается целая пачка импульсов. Большая часть этих отраженных сигналов имеет достаточную величину, чтобы все они были записаны на накопительной трубке.
Таким образом, при приеме радиолокатором отраженных сигналов от целей на тех элементах дальности накопительной трубки, которые соответствуют дальностям действительных целей, производится накопление заряда. Величина заряда в таких точках растра трубки будет пропорциональна числу записанных сигналов.
При отсутствии сигналов от цели и малых шумах записи не произойдет, а при наличии случайной сильной помехи произойдет запись только одного единичного сигнала или нескольких сигналов на различных элементах дальности.
Таким образом, на входе накопительной трубки производится разделение сигнала по амплитуде на две градации: "есть цель" и "нет цели". Следовательно, машина автоматически решает вопрос о наличии или отсутствии цели по отраженным сигналам от каждого зондирующего импульса.
После записи всех сигналов на всех элементах дальности за время прохождения одного элемента азимута производится одноразовое считывание зарядов. Так как считывание производится со стиранием, то с элементов растра снимается весь заряд и накопление заряда во время последующих операций записи будет начато с нуля. Получается, что накопительная трубка как бы суммирует число отраженных от цели импульсов в каждом элементе дальности за время прохождения каждого элемента азимута.
Второй ограничитель, стоящий на выходе накопительной трубки, обеспечивает передачу в линию в качестве целей только тех сигналов, амплитуда которых превышает заранее установленную определенную величину. Поэтому передаваемое изображение на приемном конце представляется резко контрастным, без полутонов, т. е. в каждом элементарном участке резко разграничено наличие или отсутствие сигнала, отображающего цель. Итак, на выходе накопительной трубки вторично автоматически решается вопрос о наличии или отсутствии цели.
Для такого устройства важнейшая характеристика - допустимое количество ошибок, которые могут быть в тех случаях, когда слабые отметки целей практически не отличимы от помех. Снижение уровня ошибок достигается за счет тщательной регулировки ограничителей. С этой целью входной уровень ограничения устанавливается так, что, когда сигналов от цели нет, на выходе только в исключительных случаях могут получаться квантованные сигналы, обусловленные только помехами. Ограничитель на выходе накопительной трубки регулируется так, что он тоже редко дает выходные сигналы, накопленные только от ложных входных сигналов. При надлежащем выборе обоих уровней ограничения устройство будет обладать способностью различать слабые отметки целей не хуже оператора.
Поскольку изменение усиления приемника радиолокатора может основательно нарушить работу аппаратуры, в системе SDV используется автоматическая регулировка усиления для поддержания заданного уровня ограничения.
При соответствующей калибровке аппаратура способна работать длительное время без подрегулировки.
Полученная таким образом информация с помощью специального кодирующего устройства преобразуется в двоичный код и передается со скоростью 1600 имп/сек по существующим стандартным телефонным линиям в оперативный центр сектора. Поскольку обработка и передача производятся в реальном масштабе времени, скорость передачи данных является функцией частоты сканирования (скорости вращения луча) обзорного радиолокатора. Неизбежные небольшие отклонения в скорости вращения антенны компенсируются не изменением скорости передачи, а путем допустимых изменений количества кругов дальности в каждом дискретном секторе обзора по азимуту.
Машина AN/FST-1 конструктивно состоит из двух независимых комплектов, каждый из которых может обрабатывать данные от радиолокатора и передавать их по телефонной линии. Значительная часть объема аппаратуры занята вспомогательными схемами. Автоматическое устройство обнаружения неисправностей и дистанционная контрольная аппаратура позволяют автоматически переключать вышедший из строя основной комплект на резервный. Другие устройства обеспечивают индикацию состояния аппаратуры и генерирование испытательных и калибрационных напряжений, используемых при ремонте и эксплуатации.
Каждый комплект машины помещается в двух шкафах, в одном из которых находится основная аппаратура, а в другом - источники питания. Два комплекта аппаратуры занимают четыре шкафа, в двух средних шкафах размещается основная аппаратура системы.
Монтаж блоков в машинных шкафах просматривается непосредственно. Восемь блоков покрыты масками из пластмассы, имеющими прорези, через которые можно контролировать режим аппаратуры путем проверки соответствующих контрольных точек специальным тестером. Имеется большое количество неоновых ламп, фиксирующих режим работы триггеров. Эти неоновые лампы и контрольные точки дают возможность обслуживающему персоналу регулировать аппаратуру и выявлять недостатки в ее работе.
С задней стороны каждого машинного шкафа расположены восемь блоков, собранных на сменных модульных платах. Относительно небольшое число разных модулей и легкость их замены упрощают эксплуатацию этой аппаратуры. Текущий ремонт аппаратуры в полевых условиях производится путем замены вышедших из строя модулей отремонтированными. Чтобы конструкция была компактной и узлы взаимозаменяемы, сменные модули монтируются на печатных панелях. Так как аппаратура предназначена для работы в наземных условиях, то к ней не предъявлялось жестких требований в отношении габаритов. Первостепенное значение придавалось надежности и удобству эксплуатации.
В заключение следует упомянуть о контрольном индикаторном устройстве ОА-947 (Coordinate Data Monitor), предназначенном для отображения и контроля данных, получаемых от аппаратуры SDV. В нем имеется декодирующая схема для восстановления с целью контроля передаваемого по телефонной линии того изображения, какое было на радиолокационном индикаторе кругового обзора, но уже без фона шумов. Специальными органами обеспечивается регулировка интенсивности индикации каждой цели, колец дальности и отметки "север". Устройство допускает отображение и других данных. Характерной особенностью этого контрольного устройства является наличие на нем специального фотосъемника, представляющего собой фотоэлектрическую световую "пушку", которая крепится в верхней части индикатора таким образом, что может быть расположена над любой точкой лицевой поверхности индикатора, и служит для записи координат дальности и азимута цели, попадающей в ее поле зрения, на дополнительную машинную ленту (фототелеграфный аппарат).
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'