§ 3. Машина AN/FST-2 (система FGD)
Машина AN/FST-2, разработанная лабораторией Линкольна Массачусетского технологического института и изготовленная фирмой "Берроуз", называется иначе устройством передачи координатных данных (Coordinate Data Fransmitter Set). Она состоит из двух основных частей:
- аппаратуры съема и обработки информации, поступающей от радиолокационных станций дальнего обнаружения;
- аппаратуры полуавтоматического измерения высоты.
Съем координат цели. Первая часть машины выполняет следующие функции:
- получение первичной информации от обзорных РЛС и аппаратуры опознавания;
- выделение эхо-сигналов из шумов;
- определение дальности и азимута целей;
- опознавание;
- временное хранение радиолокационной информации;
- преобразование информации в цифровой код для передачи ее по линии связи в оперативный центр системы "Сейдж".
Аппаратура съема системы FGD (Fine-Grain Data - высокодискретные данные) работает следующим образом.
На вход машины поступают все видеосигналы с выхода поисковых РЛС и аппаратуры опознавания. Обработка этих сигналов в машине позволяет выделить полезную информацию о целях на фоне шумов приемника и отраженных сигналов от земли, моря, облаков и местных предметов. Для улучшения процесса фильтрации входной информации в машине предусмотрена обратная связь с выхода машины на вход.
Поступающие видеосигналы в машине квантуются (разделяются) по дальности, преобразуются в импульсы двоичного цифрового кода и передаются для записи на магнитный барабан с достаточным количеством дорожек. Магнитный барабан вращается с большой скоростью, которая точно синхронизируется с частотой посылок радиолокатора при помощи чувствительной следящей системы. Каждая дорожка барабана имеет головку записи и воспроизведения. При этом информация, записанная на барабан записывающей головкой, считывается головкой воспроизведения точно через интервал времени, равный периоду посылок зондирующих импульсов РЛС. Магнитный барабан хранит информацию, полученную со всех дальностей, на время обработки этой информации вычислительным устройством.
На N дорожках барабана, рассчитанных на запись всего числа излученных импульсов пакета, принятые эхо-сигналы записываются в виде квантованных импульсов, число которых обычно равно AZ, где 0 ≤ n ≤ N. Принятые импульсы записываются на соседних дорожках последовательно через каждый период посылки зондирующих импульсов и хранятся до окончания приема импульсов всего пакета. После этого производится обработка записанной информации.
В определенный момент головки воспроизведения начинают считывать записанные эхо-импульсы для данной дальности R1 и с помощью накопительных цепей и схем сравнения сравнивают число записанных импульсов n с заранее установленным числом n1 являющимся критерием при определении полезности информации. Число отраженных импульсов от реальной цели п должно быть не меньше n1.
Число n1 определяется статистическими методами при рассмотрении типовой пачки отраженных от цели импульсов с определенной дальности для первой (набегающей) половины луча РЛС. Такими же статистическими методами определяют и среднее число принимаемых импульсов n2, приходящихся на вторую (сбегающую) половину луча. Числа n1 и n2 являются функциями дальности и, как показывает статистика, обычно n2 < n1
Выделение полезной информации из принятых сигналов в этой машине осуществляется методом "скользящего строба". Как только путем сравнения n и n1 будет установлено, что записанная на магнитном барабане пачка импульсов принята от реальной цели, характеристики этой цели (дальность, азимут и др.) автоматически определяются и эта информация передается на выходное устройство машины.
Дальность до цели измеряется триггерным счетчиком масштабных импульсов дальности, генерируемых специальным калиброванным генератором, который запускается одновременно с посылкой зондирующего импульса РЛС. Счетчик измеряет отрезок времени между моментом посылки зондирующего импульса и моментом приема эхо-сигнала, который соответствует дальности до цели.
Вышеупомянутое разделение луча РЛС на набегающую и сбегающую половины позволяет с высокой точностью определить азимут цели. За истинный азимут цели принимается полусумма азимутов начала и конца пакета импульсов, облучающих данную цель.
Схема (рис. 3.2) определения текущего азимута цели работает следующим образом. В схеме имеется счетчик масштабных импульсов азимута, вырабатываемых специальным генератором, связанным с приводом вращения антенны РЛС, который фиксирует азимут антенны РЛС в цифровом коде на любой момент времени. Этот счетчик один раз за период обзора синхронизируется с вращением антенны при помощи маркерного импульса "север", устанавливающего счетчик на нуль. Несинхронность частоты следования импульсов РЛС со скоростью вращения антенны не влияет на точность определения азимута.
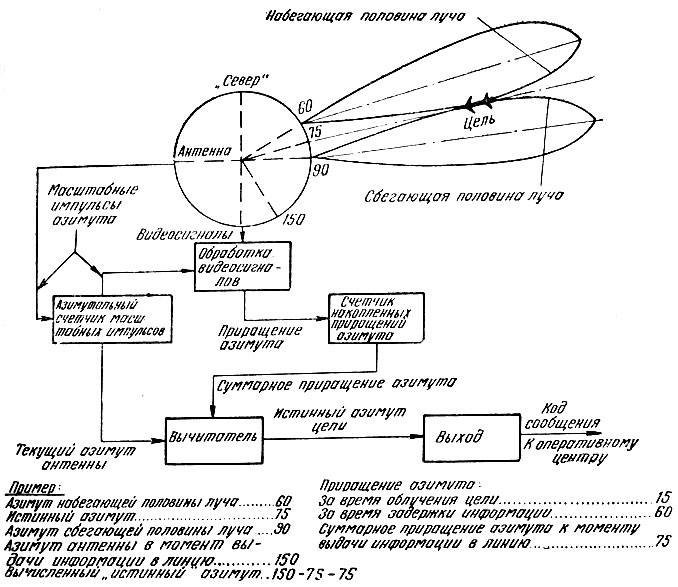
Рис. 3.2. Принцип автоматического определения азимута цели в машине AN/FST-2
Для облегчения определения точного азимута ведется дополнительный счет масштабных импульсов азимута, зарегистрированных во время облучения цели радиолокатором. С этой целью масштабные импульсы азимута записываются на дополнительных дорожках барабана, специально отведенных для записи азимутальных импульсов при помощи специального счетчика. При подходе набегающей части луча к цели на полосе дорожки соответствующей дальности записывается нуль, затем, пока цель находится в пределах луча РЛС, счетчик считает масштабные импульсы азимута между очередными посылками зондирующих импульсов с частотой, в два раза меньшей, и это уменьшенное в два раза количество азимутальных импульсов записывается на дорожке барабана (накопителя) за каждый период посылок. Как только цель останется за пределами сбегающей части луча, сосчитанное этим счетчиком и записанное в накопителе количество азимутальных импульсов вычитается из показания основного счетчика масштабных импульсов азимута, что дает истинное, значение азимута цели.
Однако, поскольку по окончании расчета истинного азимута цели линия связи может быть занята передачей другой информации, число азимутальных импульсов, записанное во время облучения цели, остается на барабане, но к нему продолжают добавляться масштабные импульсы азимута, поступающие уже с нормальной частотой.
Как только линия связи будет готова к передаче очередного сообщения и информация о цели будет передаваться на выходные регистры, суммарное количество азимутальных импульсов, записанных на барабане, вычитается из всего количества масштабных импульсов азимута, зарегистрированного основным счетчиком. В результате получится то же самое истинное значение азимута цели, несмотря на задержку в передаче.
При передаче информации в выходное устройство данные об азимуте снимаются с магнитного барабана, данные о дальности - с регистра дальности. Информация о целях, полученная по каналам опознавания и активного ответа, обрабатывается в отдельном канале машины. Так как ответные сигналы значительно больше по мощности, чем эхо-сигналы, для их обработки используются другие критерии обнаружения. Информация, полученная по каналам опознавания и активного ответа, сопровождается специальным признаком в выходном сообщении.
При сложной воздушной обстановке информация о некоторых целях может храниться в машине в течение нескольких секунд, прежде чем она поступит в линию связи. Поэтому в машине производится изменение промежутка времени между моментом приема последнего импульса пакета и моментом передачи информации в выходное устройство. Это время задержки ("старения") информации является важным показателем для оперативного центра. Если время задержки информации о координатах цели превышает заранее установленную величину, информация считается устаревшей и стирается с устройств памяти. При этом предполагается, что цель будет обнаружена вновь в следующем периоде обзора. Стирание же еще не устаревших данных может произойти только при исключительно сложной воздушной обстановке.
В выходном устройстве машины AN/FST-2 сосредоточивается вся информация о цели. В состав информации, передаваемой с машины в оперативный центр, входят следующие данные: азимут, дальность, ширина пакета (число масштабных импульсов между набегающим и сбегающим краями луча), время хранения информации (время между моментом прихода последнего импульса пакета и моментом выдачи информации в линию связи), признак опознавания и синхронизирующий импульс. Другие характеристики цели определяются и передаются по специальному запросу из оперативного центра.
Некоторая информация, передаваемая в оперативный центр, маркируется специальным кодом. К такой информации относятся:
- "контрольная цель", сигналы которой вырабатываются один раз за период обзора для проверки работы машины AN/FST-2;
- ответная информация о высоте цели, имеющая преимущество перед другой информацией в отношении очередности передачи по той же линии связи.
Когда линия связи готова к передаче, информация с выходного регистра машины со скоростью 1300 имп/сек поступает в преобразующее устройство, которое последовательный ряд импульсов преобразует в синусоидальный сигнал для передачи информации в таком виде в линию связи.
Измерение высоты. Информацию о высоте цели получает секция SAH/F (Semiautomatic Height Finder - полуавтоматический измеритель высоты) машины AN/FST-2.
Эта вторая часть машины осуществляет следующие функции:
- получение из оперативного центра запросных команд о необходимости измерения высоты или определения дополнительных характеристик некоторых важных целей;
- выработку команд целеуказания высотомеру для разворота его антенны на заданный азимут;
- обеспечение операторов визуальной информацией о характеристиках определенных целей;
- подготовку данных оператору для принятия решения о передаче информации в оперативный центр.
Одна машина AN/FST-2 рассчитана на работу с двумя радиолокационными высотомерами, обслуживаемыми двумя операторами. Полуавтоматический высотомер SAH/F (рис. 3.3) работает следующим образом. Из оперативного центра по линии связи в машину AN/FST-2 поступает запрос о высоте конкретной цели. В этом запросе содержатся коды плоскостных координат X и У запрашиваемой цели, предполагаемое или последнее значение высоты, а также такие признаки, как номер радиолокационного узла и номер цели.
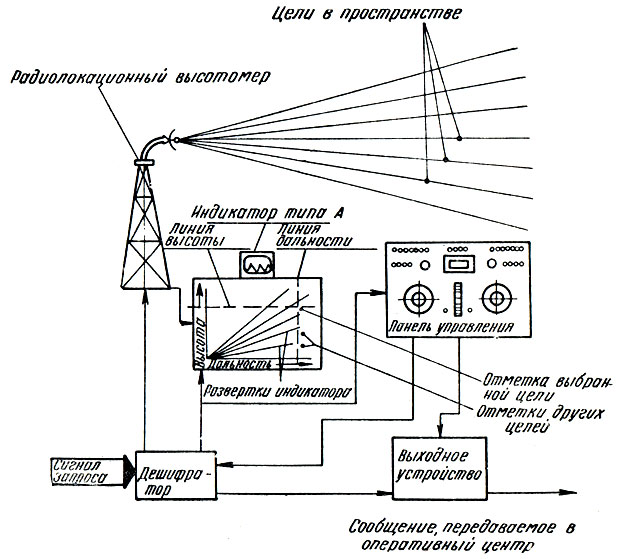
Рис. 3.3. Принцип полуавтоматического определения высоты цели в машине AN/FST-2
С помощью специального дискретно-аналогового преобразователя и следящей системы прямоугольные координаты в дискретной форме быстро преобразуются в полярные координаты в виде непрерывных напряжений. Значение угла преобразуется в положение вала, которое передается на антенну радиолокационного высотомера. Значение дальности преобразуется в напряжение, которое используется для выработки импульсного строба дальности.
Таким образом, по получении запросных команд высотомер разворачивает антенну на заданный азимут цели и вырабатывает импульс дальности, который отмечает указанную дальность до цели на индикаторе "дальность - высота". Кроме того, высотомер преобразует цифровой код высоты, хранящийся в его регистре высоты, в постоянное напряжение, которое используется для отметки высоты на том же индикаторе. Как только высотомер окажется направленным на цель по всем координатам, оператор предупреждается об этом специальным визуальным сигналом на пульте управления, а на экране индикатора высотомера высвечиваются линии дальности и высота вблизи отметки той цели, высота которой должна быть измерена.
Сигналы, поступающие от радиолокационного высотомера, отображают на экране индикатора отметки целей и угол места антенны. Вертикальная пунктирная линия дальности образуется стробом дальности, который подсвечивает развертку индикатора, когда она проходит точку заданной дальности, а горизонтальная линия высоты наносится путем наложения напряжения высоты, полученного от высотомера, на напряжение развертки индикатора.
На пульте управления оператора высоты имеется штурвал (маховик), связанный с датчиком масштабных импульсов высоты, счет которых производится в регистре высоты, находящемся в высотомерной части машины AN/FST-2. Направление вращения штурвала определяет суммирование или вычитание импульсов в регистре высоты. Поворачивая штурвал, оператор совмещает линию высоты с отметкой нужной цели, находящейся на линии заданной дальности, В момент совмещения оператор нажимает на кнопку отсчета и этим обеспечивает передачу информации о высоте цели в регистр высоты, где она хранится до того момента, когда автоматически будет передана в оперативный центр.
Определение дополнительных характеристик. В высотомерной части машины AN/FST-2 имеется устройство, позволяющее определять дополнительные характеристики цели также по специальному запросу из оперативного центра. В запросе может содержаться требование уточнить, например, количество самолетов в группе, ширину и глубину строя и т. д. При получении запроса на индикаторе оператора по уточнению характеристик высвечиваются особые визуальные сигналы. Уточнение характеристик цели производится на специальном индикаторе типа А, на котором район выбранной цели просматривается в увеличенном масштабе на участке протяженностью 8 км. Переключатели на пульте оператора позволяют вводить коды признаков дополнительных характеристик в состав выходного сообщения, передаваемого в оперативный центр.
Конструкция, надежность и обслуживание. Для обеспечения непрерывной работы в течение многих суток аппаратура AN/FST-2 состоит из двух одинаковых машин, работающих попеременно (дуплексная система). Поскольку информация хранится в машине в течение всего нескольких секунд, нет необходимости в непрерывном обмене между двумя машинами, как это имеет место в машинах AN/FSQ-7 оперативного центра.
Машина AN/FST-2 устанавливается на радиолокационном узле в стационарном помещении. Электронное оборудование и источник питания для двух машин размещаются в стандартных шкафах (рис. 3.4), снабженных системой кондиционирования воздуха. Все оборудование дуплекса занимает 21 шкаф. Шкафы располагаются в три ряда по восемь, пять и восемь шкафов в ряду соответственно. Для обеспечения надежности имеется два комплекта источников питания, которые занимают четыре шкафа среднего ряда. В пятом центральном шкафу расположена аппаратура коммутации, обеспечивающая подачу напряжения от любого источника питания на любую из двух машин дуплекса. Каждая из машин размещается в восьми шкафах одного из крайних рядов.
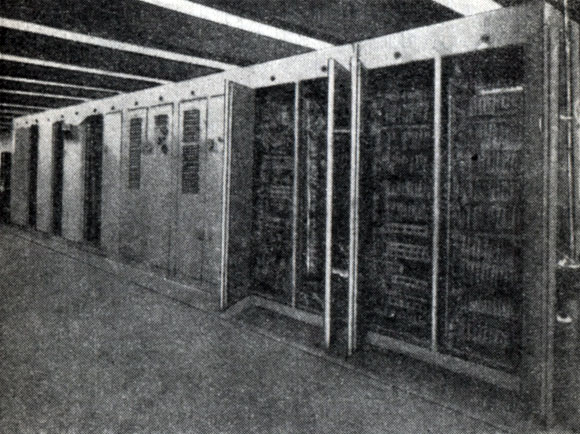
Рис. 3.4. Стандартные шкафы с электронным оборудованием машины AN/FST-2
В систему AN/FST-2 входит также несколько индикаторных устройств с пультами управления, обслуживаемых операторами. Вся аппаратура дуплекса потребляет мощность около 43,5 ква, и для вентиляции необходима система кондиционирования воздуха.
Каждая машина AN/FST-2 содержит около 6900 электронных ламп и 24000 полупроводниковых диодов (рис. 3.5). Для удобства сборки, обслуживания и ремонта машины отдельные ее устройства и блоки (триггеры, усилители, инверторы, вентили, диодные матрицы и др.) выполнены в виде стандартных ячеек с печатным монтажом (рис. 3.6). Некоторые устройства, содержащие детали больших габаритов или требующие специального монтажа, или сборки, собраны на шасси стандартных блоков с салазками, что обеспечивает легкий доступ к блокам.
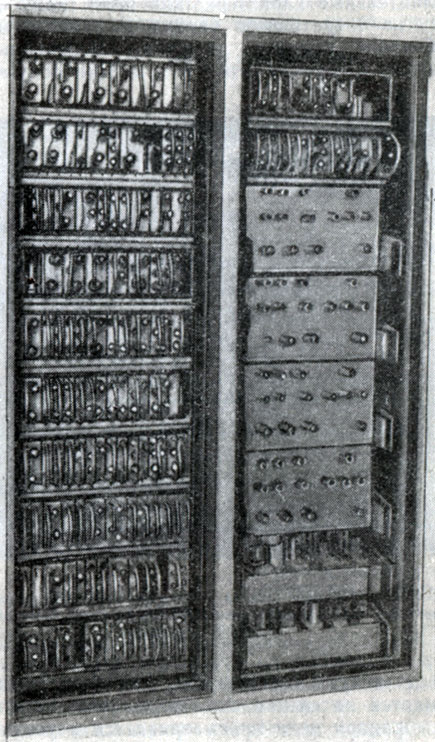
Рис. 3.5. Внутренний вид стандартного шкафа машины AN/FST-2
Машина AN/FST-2 проектировалась, исходя из высоких требований в отношении надежности. При этом расчет велся на самый худший случай, т. е. допускалось, что все элементы машины имеют одинаковый срок службы. Конструкция машины получилась сложная. Она усложнилась еще из-за требования несинхронности частоты посылок со скоростью вращения антенны и скоростью передачи данных по линиям связи. Усложнение конструкции привело к затруднениям в обнаружении и устранении неисправностей в схемах машины.
Рис. 3.6. Съемные ячейки с печатным монтажом для стандартных блоков машины AN/FST-2
Для облегчения контроля за работой машины и профилактического осмотра в машине AN/FST-2 предусмотрены система контроля запаса надежности и большое количество внутренних устройств для контроля и проверки цепей. Благодаря этим устройствам много проверок может производиться во время нормальной работы машины. Кроме того, для полной проверки всех частей машины предусмотрен имитатор целей, который вырабатывает периодически повторяющиеся всевозможные характеристики целей. По желанию обслуживающего персонала имитатор может обеспечить синхронизацию частоты генерируемых им триг-герных импульсов, азимутальных масштабных импульсов и частоты посылок импульсов по линии связи.
Для контроля за работой и обслуживанием машины AN/FST-2 в комплекте машины предусмотрены два индикатора. Один из них - индикатор кругового обзора (РРI), установленный вблизи передней панели машины, - обеспечивает отображение сигналов обнаруженных целей и различных вспомогательных квантованных видеосигналов. Другой - индикатор дискретных данных типа В - позволяет осуществлять строгий контроль за координатами азимута и дальности каждой цели, передаваемой в оперативный центр.
Кроме того, на радиолокационном узле устанавливаются индикатор типа RAPPI (Random Access PPI) для фильтрации случайно попавших сигналов и связанная с ним буквопечатающая машина для контроля и записи (документирования) выходной информации.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'