1. Приборы управления движением торпед по глубине
Для управления движением торпед используются чувствительные элементы, определяющие глубину хода, дифферент, углы рыскания, линейные и угловые скорости и ускорения. Устройства для измерения глубины хода торпед основаны на использовании мембран и сильфонов, которые реагируют на разность сил упругости пружины и статического давления столба воды.
Резиновые мембраны обладают переменной жесткостью и их характеристики линейны только в малых (до 1,5...3,0 мм) диапазонах перемещения.
Более совершенны сильфоны. Их чувствительность не изменяется в процессе эксплуатации, они пригодны для замера больших глубин. Для расширения линейной части характеристики сильфоны изготовляют из отдельных тонких пластин путем пайки.
В настоящее время в качестве чувствительных элементов для определения дифферента торпеды применяют физические маятники. Они просты по устройству, обладают высокими стабилизирующими свойствами и поэтому находят широкое применение в автоматах глубины (АГ).
Принцип действия АГ маятникового типа. Возможности и качество работы автомата глубины в значительной мере зависят от типа связи между чувствительными элементами. Лучшие результаты получаются, когда чувствительные элементы работают автономно, т. е. независимо друг от друга подают импульсы на перемещение золотника рулевой машинки.
Рассмотрим принцип действия такого АГ (рис. 13). При нарушении равновесия сил натяжения пружины и давления воды происходит сжатие или растяжение сильфона 1 и перемещение зубчатой рейки. Последняя вращает шестеренку, которая разворачивает эксцентрик, связанный с балансиром 5, и вызывает перемещение тяги к золотнику 3 РМ. Маятник 2 остается в вертикальном положении, так как балансир 5 поворачивается в этом случае относительно точки О. При отклонении же торпеды по дифференту маятник 2 передает перемещение на золотник РМ, не вызывая перемещения сильфона 1, так как балансир 5 будет поворачиваться относительно точки О'.
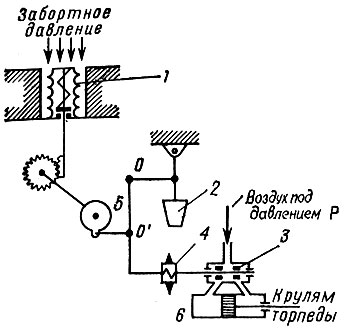
Рис. 13. Кинематическая связь чувствительных элементов сильфонно-маятникового прибора: 1 - сильфон; 2 - маятник; 3 - золотник рулевой машинки; 4 - регулируемое звено свободного узла перекладки рулей; 5 - балансир; 6 - рулевая машинка
Такой вариант связи чувствительных элементов исключает взаимное искажение сигналов. Например, инерционность маятника не оказывает влияния на работу гидростатической части. Наличие двух степеней свободы позволяет применять этот АГ для управления движением по прямолинейным траекториям в горизонтальной и наклонной плоскостях.
Когда торпеда заглубляется или всплывает, а также движется по командам АСН, управление по глубине осуществляется только с помощью маятниковой части прибора. Когда же она перемещается в горизонтальной плоскости или переходит на горизонтальное движение (переходный процесс), управление производится совместно маятником и гидростатом.
Сильфонно-маятниковый прибор (СМП) обеспечивает выход торпеды на заранее установленную глубину с постоянным дифферентом 25° при выстреливании с надводных кораблей и подводных лодок, горизонтальное движение торпеды на установленной глубине до поступления сигнала от АСН, движение торпеды в вертикальной плоскости по сигналам АСН. Кроме того, СМП ограничивает выполнение акустических сигналов по глубине, а при прекращении поступления сигнала от АСН фиксирует глубину потери цели для обеспечения ее повторного поиска.
Управляя золотником 3 рулевой машинки 6, СМП обеспечивает лишь позиционную перекладку рулей (максимальные углы перекладки), так как при поступлении воздуха в полость цилиндра РМ поршень перемещается в крайнее положение.
Сжатый воздух в РМ может распределяться золотником, и его рубашкой, что позволяет применить обратную связь поршня с золотниковым устройством, обеспечивающую строгое соответствие перемещения поршня перемещению золотника (следящая система). Золотниковая тяга, связывающая рулевую машинку с маятниковой частью СМП, имеет устройство 4 для регулировки длины.
Практически поршень РМ перемещается на протяжении всего времени движения торпеды, так как СМП реагирует на отклонение торпеды по глубине с некоторым запаздыванием. Вследствие этого перекладка рулей происходит несколько позже прихода торпеды на установленную глубину. При заглублении торпеды сверх величины, установленной на гидростате аварийного устройства непотопляемости (АУН), последнее срабатывает и обеспечивает выход торпеды на поверхность.
В гидростатических аппаратах торпед 53 - 39, ЭТ-46 и 53-56В чувствительные элементы соединены между собой жестко, и на РМ подается суммарное воздействие от глубины и дифферента (рис. 14). Действие АГ основано на равновесии сил гидростатической пружины 4 и давления воды, приложенных с двух противоположных сторон к подвижному диску 1. Нарушение этого равновесия вследствие изменения глубины во время хода торпеды вызывает перемещение диска, а, следовательно, эластичной тяги 3, а за ней маятника 2. Маятник, связанный с диском гидростата 1 и с золотником, воздействует на РМ, которая перекладывает рули для вывода торпеды на требуемую глубину.
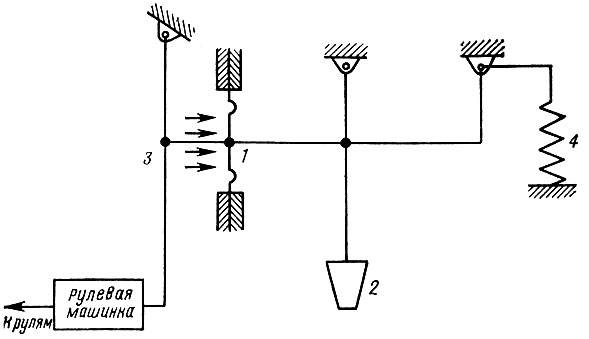
Рис. 14. Принципиальная схема автомата глубины с жесткой связью чувствительных элементов: 1 - подвижный диск гидростата; 2 - маятник; 3 - эластичная тяга; 4 - пружина
При дифференте торпеды в результате изменения глубины маятник 2 стремится занять отвесное положение и тем самым изменяет свое положение относительно корпуса торпеды. Он перемещается вперед или назад до упора в стойку и, противодействуя подвижному диску 1, воздействует на золотник рулевой машинки.
Понятно, что такие АГ не могут использоваться для управления движением торпед по наклонным траекториям, так как суммарное воздействие от глубины и дифферента происходит при их одновременном и взаимном искажении.
В современных образцах торпед может применяться и электрическая связь чувствительных элементов.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'