2. Приборы управления движением торпед в горизонтальной плоскости
Автоматическое управление движением торпеды по направлению осуществляется с помощью прибора курса (ПК) (гироскопического датчика угла), чувствительным элементом которого служит гироскоп с тремя степенями свободы.
ПК должен обеспечивать движение торпеды по заданной траектории с заданной точностью и надежно работать при использовании торпед с различных носителей. Кроме того, он должен быть прост, позволять быстро изменять установки параметров траектории и вести стрельбу торпедами при любом положении корабля.
В состав ПК (рис. 15) обычно входят:
чувствительный элемент - для измерения угла отклонения торпеды от заданного направления;
механизм разгона гироскопа - для придания ротору частоты вращения, при которой он приобретает свойство устойчивости;
механизм поддержания оборотов ротора - для компенсации потери частоты вращения вследствие трения ротора о воздух и в осях;
арретирующее устройство - для установки главной оси гироскопа в нужном направлении при разгоне ротора и для предотвращения повреждений при транспортировке;
усилительный элемент - для усиления сигнала управления, снятого с чувствительного элемента, до величины, необходимой для срабатывания исполнительного элемента;
исполнительный элемент - для создания усилия, воздействующего на регулирующий элемент. Исполнительным элементом обычно является поршень РМ;
программный механизм - для задания и реализации программы (траектории) движения торпеды;
механизм сравнения - для сравнения текущего и заданного параметров движения. Им является шестерня угловой установки;
механизм ввода программы - для ручного или автоматического ввода параметров траектории;
корректирующие механизмы - для ликвидации воздействий на гироскоп вращения Земли (широтная коррекция) и различия моментов трения в осях (межрамочная коррекция).
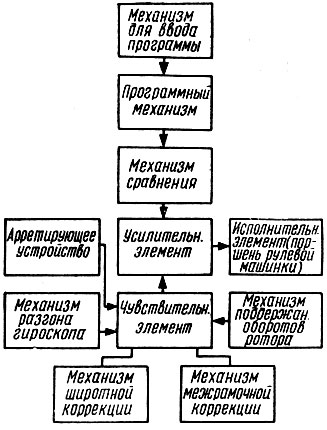
Рис. 15. Структура прибора курса автономной системы управления
В ПК гироскоп устанавливается в карданном подвесе, который устроен так, что при повороте корпуса прибора в любой плоскости направление оси вращения гироскопа в пространстве остается неизменным. Для этого карданный подвес имеет внешнее (вертикальное) и внутреннее (горизонтальное) кольца (рис. 16).
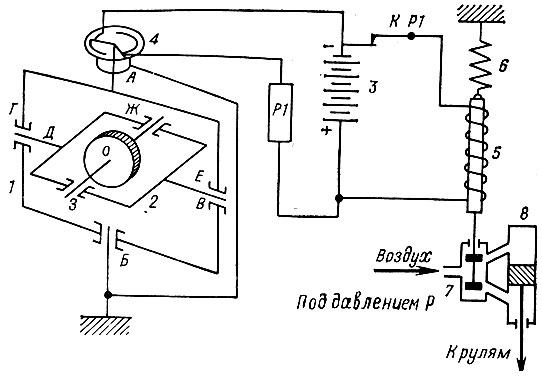
Рис. 16. Принципиальная схема прибора курса самонаводящейся торпеды: 1 вертикальное кольцо карданного подвеса; 2 - горизонтальное кольцо карданного подвеса; 3 - аккумуляторная батарея; 4 - устройство для закрепления полуколец; 5 - электромагнит; 6 - пружина; 7 - золотник рулевой машинки; 8 - рулевая машинка
Карданный подвес стремятся сделать так, чтобы оси вращения внешнего 1 и внутреннего 2 колец и ось вращения гироскопа пересекались в точке О, называемой точкой подвески гироскопа, которая должна являться центром тяжести системы гироскоп - карданный подвес.
Таким образом, гироскоп может вращаться вокруг:
оси собственного вращения гироскопа ЖЗ, называемой главной осью;
горизонтальной оси ДЕ карданного подвеса (вместе с внутренним кольцом);
вертикальной оси АБ карданного подвеса (вместе с внешним и внутренним кольцами).
Возможность вращения тела вокруг одной из осей сообщает ему одну степень свободы. Гироскоп же, имеющий возможность вращаться вокруг трех осей, называют трехстепенным. Если центр тяжести системы гироскоп -" карданный подвес совмещены, то такой гироскоп является свободным или астатическим. Главной оси свободного гироскопа можно придать любое направление в пространстве.
Разгонный механизм служит для первоначальной раскрутки ротора. В ПК разгон должен быть произведен до момента выхода торпеды из трубы торпедного аппарата, чтобы успеть придать главной оси гироскопа нужное направление. В настоящее время в приборах курса используют два типа пневматических разгонных механизмов: турбинный и бестурбинный.
Турбинный механизм, используемый в ПК МО-3 торпеды 53-39, состоит из радиальной пневматической турбины, а также устройств для выдержки времени разгона и отключения турбины от ротора по истечении времени разгона.
В момент выстрела при откидывании курка воздух из резервуара торпеды попадает к кронштейну ПК, оттуда по сверлениям в корпусе - к расточке отсекательного золотника, а из нее по четырем соплам - на лопатки турбины. Турбина, а, следовательно, и ротор быстро набирают частоту вращения, которая через 0,3...0,4 с поднимается до 15 000... 16 000 об/мин. Гироскоп приобретает свойство сохранять неизменным направление своей главной оси з пространстве, и в этот момент турбина от него отключается.
Разгонный механизм бестурбинного типа состоит из двух сопл, укрепленных в наружном кольце гироскопа, через которые в момент пуска воздух высокого давления подается непосредственно на лунки ротора и разгоняет его.
Механизм поддержания оборотов ротора. Вследствие трения в осях и трения ротора о воздух, частота вращения гироскопа при работе падает, и он теряет устойчивость. Для поддержания рабочей частоты вращения в приборах курса ставят специальные механизмы (пневматические или электрические), выбор которых определяется требуемой точностью работы.
Пневматические механизмы проще по устройству, надежнее, но затрудняют сохранение постоянной скорости вращения ротора (обеспечивают меньшую точность) и требуют значительных емкостей для хранения сжатого воздуха. Обычно такой механизм состоит из двух сопл, смонтированных в подшипниках горизонтального кольца гироскопа, через которые подается воздух низкого давления на лунки ротора.
Электрические моторы (обычно 3-фазные, асинхронные), выполняющие также роль ротора, первоначально раскручиваются с помощью разгонного механизма пневматического типа, а затем, получая трехфазное переменное напряжение 40 В 500 Гц, доводят скорость вращения ротора до рабочей и поддерживают ее на всем пути движения торпеды.
Механизм арретирования предназначен для удержания главной оси гироскопа в период пуска в строго фиксированном положении относительно корпуса ПК, а, следовательно, и относительно торпеды. Он же предохраняет ротор от ударов об ограничители при транспортировке. Такие удары из-за образования вмятин на беговых дорожках шариковых подшипников резко увеличивают моменты сил трения в опорах.
Существует множество конструкций арретирующих устройств, но все они лишают гироскоп свободы вращения вокруг осей подвеса и приводят его главную ось всегда в положение, параллельное продольной оси торпеды.
Арретирование гироскопа производится вручную, разарретирование - автоматически в момент окончания разгона ротора гироскопа.
Усилительный элемент. В автоматах курса в качестве усилительного элемента используется пневмораспределительный золотник, а в качестве исполнительного - рабочий цилиндр и поршень рулевой машинки.
Сжатый воздух под давлением 20,6·105...26,5·105 Па (21...27 кгс/см2) подводится через ниппель к средней выточке золотника. При перемещении золотника воздух через открывшееся окно попадает в подпоршневую полость и передвигает поршень до упора. Естественно, что поршень передвигается не одновременно с золотником, а с некоторым запаздыванием.
Запаздывание поршня и перекладка рулей на полный угол (на борт) делают регулирование неустойчивым, благодаря чему торпеда будет значительно отклоняться от заданного направления и терять скорость. Для повышения устойчивости процесса автоматического регулирования (уменьшения амплитуды отклонения торпеды) в систему управления вводится дополнительная обратная связь: в механизм воздухораспределения устанавливается подвижная рубашка золотника, связанная рычагами с поршнем. Быстродействие РМ достигается целесообразным выбором передаточного отношения обратной связи.
Программный механизм. Наличие этого механизма в системе управления курсом торпеды не является абсолютно необходимым. Если торпеда должна двигаться по прямой, то такой механизм не нужен, если же ее нужно послать под углом к направлению стрельбы, то, конечно, система должна иметь устройство, обеспечивающее задание величины и стороны поворота торпеды.
Понятно, что для поворота торпеды в точке залпа нужно переложить руль и держать его в таком положении до тех пор, пока торпеда не повернет на заданный угол. Руль перекладывает поршень РМ под действием сжатого воздуха. Воздух к поршню РМ подается тогда, когда золотник сдвинут из среднего положения, что происходит только при повороте торпеды вокруг "неподвижно" стоящего гироскопа. Круглая золотниковая коробка получила название шестерни угловой установки, так как на ее корпусе нарезаны обеспечивающие разворот зубья.
Способность совершать поворот в точке залпа значительно расширила возможности применения торпеды, пределы позиции залпа по курсовому углу, обеспечила возможность стрельбы залпом - сектором.
Корректирующий механизм. Положение оси гироскопа относительно земных ориентиров, вращающихся вместе с Землей в мировом пространстве, как правило, непрерывно изменяется. Характер изменения зависит от места расположения гироскопа на земной поверхности. Если ось быстровращающегося ротора гироскопа ориентировать на Северном полюсе горизонтально в направлении какой-нибудь звезды, то наблюдателю со временем покажется, что она непрерывно отклоняется от плоскости меридиана по ходу часовой стрелки со скоростью суточного вращения Земли. Это кажущееся вращение гироскопа относительно земных ориентиров называют "уходом" гироскопа из-за вращения Земли или кажущейся прецессией.
Для устранения "ухода" оси гироскопа в горизонтальной плоскости ее стабилизируют относительно земных ориентиров. С этой целью вызывают непрерывную прецессию гироскопа по отношению к мировому пространству в ту же сторону и с той же скоростью, с какими плоскость горизонта вращается в мировом пространстве вокруг вертикали данного места, т. е. угловая скорость прецессии должна быть равна по величине и направлению вертикальной составляющей земного вращения.
Для сохранения положения главной оси неизменным относительно земных ориентиров в гироскопах применяют корректирующие устройства, которые с помощью моментов внешних сил вызывают прецессию гироскопа в нужном направлении с требуемой скоростью. Для этого на заднем кольце оси ротора имеются регулировочные гайки, смещающие центр тяжести ротора. Изменяя их положение, создают внешний момент, вызывающий необходимую прецессию.
Автомат курса комбинированных систем управления. Структурная схема комбинированной системы управления торпедой по курсу в основе своей такая же, как и автономной системы. Добавляется лишь АСН, которая с приходом торпеды на радиус реагирования отключает чувствительный элемент автономной системы и на основе анализа внешней информации о взаимном положении торпеды и цели вырабатывает сигналы управления, приводящие торпеду на оптимальную траекторию встречи торпеды с целью.
Так как аппаратура самонаведения использует для работы электрическую энергию, то усилительный элемент также делается электрическим. Для того чтобы не ставить дополнительного усилителя при работе только автономной системы и для повышения точности регулирования, сигнал, снимаемый с чувствительного элемента, обычно преобразуется также в электрический. Исполнительный и регулирующий элементы остаются теми же.
Приборы курса комбинированных систем управления, управляют торпедой самостоятельно (автономно) и по сигналам АСН. Самостоятельное управление по заранее рассчитанной и введенной в прибор программе продолжается до тех пор, пока торпеда не подойдет к цели на радиус реагирования АСН. Когда это произойдет, аппаратура самонаведения берет управление на себя: отключает чувствительный и усилительный элементы и выдает усиленные сигналы управления на исполнительный элемент (поршень РМ), который, воздействуя на рули, приводит торпеду на заданный курс.
Конструктивно ПК комбинированных систем представляют собой автомат автономной системы, к которому добавлено устройство для передачи команд АСН на поршень рулевой машинки.
В торпедных приборах применяется несколько типов отключающих устройств, но наиболее распространены воздухораспределительные золотники и реле. В обоих случаях используется релейный закон управления, при котором рули перекладываются всегда на полный угол ("на борт") и не могут занимать никакого промежуточного положения, например, в плоскости рамы. Принцип работы прибора курса ясен из рис. 16.
К оси вертикального кольца гироскопа прикреплен токосъемник, контакт которого при повороте торпеды может скользить по двум полукольцам, установленным на корпусе ПК. Одно из полуколец соединено с минусом батареи, а плюс батареи - с контактом через обмотку реле P1 Контакт реле КР1 управляет подачей напряжения на электромагнит, связанный с воздухораспределительным золотником рулевой машинки. Сердечник электромагнита все время находится под действием пружины, обеспечивая сдвиг золотника, а, следовательно, и перекладку рулей на борт.
В исходном положении контакт токосъемника находится в зазоре между полукольцами. Когда же торпеда отклоняется влево или вправо от заданного направления, то вместе с нею отклоняется и корпус прибора с полукольцами. Если контакт токосъемника оказался на полукольце, находящемся под напряжением, то срабатывает реле Р1, замыкаются контакты КР1, электромагнит, пересиливая усилие пружины 6, передвигает золотник 7 в противоположную сторону, что вызывает перекладку рулей на другой борт и поворот торпеды в сторону заданного направления. После поворота торпеды в заданном направлении контакт токосъемника приходит на зазор или на полукольцо, на которое не подано напряжение, рули перекладываются в противоположную сторону, и процесс повторяется.
Если торпеду необходимо повернуть в точке залпа или в пути, то достаточно повернуть часть ПК с полукольцами относительно гироскопа. Рули переложатся в нужную сторону, и торпеда будет поворачиваться до тех пор, пока не достигнет угла, равного углу поворота полуколец.
Проверка прибора курса. ПК после изготовления, после переборок и при приемках на корабли проходят проверку на специальном столе, который воспроизводит работу прибора в торпеде.
На столе для прокачки ПК определяется его устойчивость за время работы, соответствующее ходу торпеды в воде. Здесь же снимается диаграмма хода поршня рулевой машинки при данных условиях качания (рис. 17).
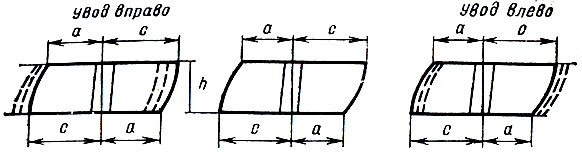
Рис. 17. Диаграмма прибора курса
Отрезок а характеризует подвижную нечувствительность прибора к поворотам: после его прохождения поршень РМ начинает перемещаться и приходит в другое крайнее положение. При устойчивой работе ПК размеры а с обеих сторон диаграммы должны быть между собой равны. Такое же равенство должно быть и у размеров с.
В процессе испытаний (прокачки) приборов бывают случаи, когда разность отрезков а и с превышает допустимые нормы. Это происходит вследствие неправильной регулировки (плохой устойчивости прибора), характеризующейся смещением боковых линий диаграммы, и называется уводом.
Если размер а верхней линии диаграммы уменьшается, а нижней - увеличивается, то возникает увод влево. Если же размер а верхней линии диаграммы увеличивается, а нижней - уменьшается, то такой увод называют уводом вправо. В первом случае поставленный в торпеду прибор будет уводить ее влево, а во втором - вправо от заданного направления.
Испытание ПК производится как "на прямую", что соответствует прямому ходу торпеды, так и "на углы" (вправо и влево), что соответствует стрельбе торпедой под углом.
В первом случае шестерня угловой установки и рама стола (в момент пуска) стоят на нуле, а во втором - устанавливаются на заданный угол.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'