5. Аппаратура самонаведения торпед
Основной причиной появления и развития АСН торпед является стремление повысить вероятность попадания в цель при наименьшем расходовании боезапаса и времени на подготовку к стрельбе. Так, например, при стрельбе прямоидущими торпедами с подводных лодок по эскадренному миноносцу (даже с небольших дистанций) для поражения цели требуется осуществить залп из нескольких торпед. Такой же результат дает всего одна самонаводящаяся торпеда.
Еще белее наглядно преимущество самонаводящихся торпед сказывается при использовании их против подводных лодок. Обычные торпеды можно применять лишь против лодок, находящихся в надводном положении, а самонаводящиеся способны успешно поражать и лодку, идущую на большой глубине.
Сущность подводного самонаведения заключается в изменении первоначальной и корректировании последующей траектории движения торпеды.
Возможность управления движением торпеды для повышения вероятности встречи с целью с давних времен привлекала внимание русских и иностранных изобретателей.
В 1898 г. профессор Новороссийского университета Н. Д. Пильчиков в докладной записке об изобретенном им методе беспроволочной передачи энергии указывает на возможность использования его для управления рулями минных лодок, "которые, не имея на себе ни одного человека команды, могли бы двигаться, направляться, настигать неприятельские броненосцы и топить их".
В 1904 г. в Морской технический комитет поступило три предложения по реализации АСН торпед. Авторы двух из них - штабс-капитан Н. А. Дацков и П. В. Бухало предлагали оптические системы, состоящие из двух "светочувствительных" элементов, установленных на перископе торпеды и включенных в плечи сбалансированного электрического моста.
Третье предложение - Т. П. Петрушевского. Он считал, что для корректировки курса торпеды следует использовать действие магнитного поля корабля на магнитную систему, помещенную в торпеду и связанную с ее рулями. Были и другие предложения.
Однако ни одно из них в России не было осуществлено. Причина тому - косность дореволюционного административного аппарата, боявшегося всякой новизны, в особенности, если она исходила от русского ученого или изобретателя.
Только через 18 лет после предложения Н. А. Дацкова и П. В. Бухалов Германии появились публикации об изобретении устройства для автоматического управления торпедами в зависимости от их освещенности дневным светом, а патент на аналогичное изобретение в США был выдан только в 1934 г.
Для приведения в действие аппаратуры подводного самонаведения могут использоваться самые различные физические поля кораблей. Любое физическое поле корабля - это область пространства, в пределах которой обнаруживается изменение соответствующей физической величины, обусловленное присутствием в ней корабля.
Первичное поле создается источником, находящимся на самом корабле, или образуется в результате взаимодействия корабля с окружающей средой.
Вторичное поле возникает вследствие отражения корпусом корабля поля, источник которого находится в образце оружия.
Теоретические и экспериментальные материалы по изучению физических полей корабля позволили конструкторам сделать заключение, что достаточную дальность действия способна обеспечить только АСН, реагирующая на акустическое поле корабля.
Известно, что движущийся или неподвижный корабль с работающими на борту механизмами является интенсивным источником шума, который может быть обнаружен на значительном расстоянии.
Причины шумообразования корабля - это вращение винтов, обтекание корпуса водой (гидродинамический шум). Акустическое поле корабля создается в результате суммарного влияния перечисленных факторов, но особенно большое влияние оказывает скорость корабля.
В гидроакустике, как и во многих других областях науки и техники, зачинателями были русские ученые и изобретатели. Так, в 1915 г. инженером К. В. Шиловским использовано отражение звука от различных препятствий для измерения расстояний в воде. Совместно с французским ученым коммунистом Ланжевеном он создал первый в мире образец гидролокатора, положив тем самым начало дальнейшему бурному развитию этой отрасли приборостроения.
Первые систематические работы по гидроакустике в СССР проводились в 1927 г, на одном из ленинградских заводов небольшой группой специалистов, занимавшихся исследованием имеющихся образцов гидроакустических приборов. Самостоятельно отечественные гидроакустические приборы стали разрабатываться в 1930 г. под руководством В. Н. Тюлина.
Высокий уровень советской гидроакустики дал возможность научно-исследовательским организациям и промышленности создать в 1938 г. образец акустической самонаводящейся торпеды.
Разработка акустических самонаводящихся торпед в Германии началась только в 1937 г., а в Англии и США значительно позже.
Вначале антенна АСН торпеды рассчитывалась на сравнительно низкую звуковую частоту, а аппаратуру предлагалось установить в парогазовой торпеде. Но собственные шумы такой торпеды оказались настолько большими, что даже снижение скорости до 30 уз не смогло обеспечить нормальную работу аппаратуры и системы самонаведения в целом.
С началом Великой Отечественной войны работы по созданию АСН велись менее интенсивно, а затем и вообще были прекращены.
В первые послевоенные годы в нашей стране после заводских и государственных испытаний была принята на вооружение ВМФ самонаводящаяся акустическая электрическая торпеда САЭТ-50.
Большое внимание за рубежом уделяют разработке АСН, реагирующей на кильватерный след (КС). При рассмотрении этого вопроса воспользуемся терминологией, принятой в ВМС НАТО, и публикациями иностранной печати. Обычно под КС понимают видимую полосу вспененной воды за кормой идущего судна. Такой след образуется не только при работе гребных винтов, он тянется и за парусником, и за шлюпкой. Специальные приборы позволяют установить его существование благодаря таким характерным особенностям, как турбулентность, насыщенность воздушными пузырьками и термический эффект.
Турбулентность внутри КС возникает, прежде всего, потому, что лопасти вращающегося гребного винта сообщают частицам жидкости, соприкасающимися с ними, определенное количество движения.
Насыщенность КС воздушными пузырьками объясняется, прежде всего, кавитационными процессами, происходящими при вращении гребного винта. В одном из периодических зарубежных изданий указывалось, что спустя минуту после прохода эскадренного миноносца, следующего со скоростью 46,3 км/ч (25 уз), в каждом литре воды его КС содержится около 0,0009 см3 газов в виде отдельных взвешенных пузырьков. Процесс зарождения и колебания пузырьков во многом определяет время жизни КС.
В некоторой степени насыщение КС воздухом происходит и в районе ватерлинии корабля при захлопывании объема, вытесненного его корпусом.
Поглощение звука и отражение его от КС объясняется тем, что многочисленные пузырьки воздуха, находящиеся в ней во взвешенном состоянии, эффективно рассеивают и отражают акустическую энергию.
Отражательная способность следа зависит от его физических параметров, гидрологических условий и характеристик гидролокаторов. Средняя звуковая энергия, отраженная от КС, является суммой отражений пузырьков воздуха, равномерно распространенных в КС. В отношении КС употребляется специальный термин "акустическая сила кильватерного следа", характеризующая отражательную способность КС применительно к одному метру его длины.
С течением времени акустическая сила КС уменьшается. Так, спустя 15 мин после прохода крейсера со скоростью 27,8 км/ч (15 уз) интенсивность сигнала, отраженного от следа, уменьшается на 20 дБ.
Термический эффект КС проявляется в том, что на одной и той же глубине температура воды в его пределах отличается от температуры воды вне следа. Хотя корабль и является источником теплового излучения, нагрев воды в его КС ничтожно мал и вряд ли может быть обнаружен. Но при работе гребных винтов большие массы воды приводятся в движение и поднимаются с глубины на поверхность. Их температура отличается от температуры невозмущенной воды на поверхности, что и приводит к возникновению термического эффекта.
Основные геометрические характеристики КС - его длина, ширина и глубина - зависят от скорости хода, размеров корабля и его формы. Для надводного корабля длина КС может достигать тысячи и более метров. Что же касается подводной лодки, то на длину ее КС очень большое влияние оказывает глубина погружения. Так, например, для средней ПЛ, идущей со скоростью 10,5 км/ч (6 уз), на глубине погружения 15 м длина КС составляет около 900 м, на глубине 27 м - 215 м, а на глубине 38 м - всего 40 м.
Ширина следа увеличивается по мере удаления от кормы корабля. Обычно сразу за кормой корабля угол растворения струи равен 50°, а на расстоянии около 100 м он составляет около 1°.
Глубина (толщина) КС составляет примерно 1,5...2 величины осадки корабля непосредственно у кормы и по мере удаления от нее меняется незначительно.
Итак, по физической природе управляющего поля, используемого для поддержания контакта с кораблем-целью, ССН подразделяются на акустические и работающие по кильватерному следу. По принадлежности физического поля существуют пассивные и активные ССН. Носителями систем самонаведения могут быть торпеды (авиационные и корабельные), подводные ракеты, мины-торпеды, глубинные бомбы.
Структурная схема пассивной акустической ССН торпеды. Независимо от принципа действия любая ССН обнаруживает цель, определяет ее положение относительно продольной оси торпеды, вырабатывает необходимые команды рулевому управлению и автоматически корректирует курс.
Поскольку самонаводящаяся торпеда является оружием разового действия, предусматривают меры, обеспечивающие безотказное срабатывание всех ее элементов. Так, аппаратура ССН должна быть не только надежной, но и, ни в коем случае не реагировать на воздействие как естественных, так и искусственных помех.
Как отмечают специалисты стран НАТО, достоинством пассивных акустических ССН является скрытность действия, а также сравнительно малые массы и габариты. Вместе с тем, пассивная АСН плохо наводится на тихоходные и обесшумленные корабли, дальность действия их в большой степени зависит от скорости хода торпеды. Кроме того, они имеют плохую защищенность от искусственных помех, что облегчает ведение борьбы с ними. Активные системы в значительной степени лишены этих недостатков. Собственное поле позволяет этим системам реагировать на обесшумленные, тихоходные и даже неподвижные корабли, а также повышать скорости хода самонаводящихся торпед.
Возможность обнаружения цели и определение ее положения относительно оси торпеды (пеленгация цели) основывается на использовании направленных свойств приемных устройств. Направленное действие антенны оценивается характеристикой направленности, т. е. законом изменения электрического напряжения на выходе антенны в зависимости от направления на источник звука. Возможны два метода пеленгации цели: по максимуму и по равносигнальной зоне.
Итак, ССН является элементом замкнутой системы автоматического регулирования (рис. 22). В эту систему кроме торпеды с ССН входят корабль-цель, как источник информации, и среда, как носитель информации. Антенна (А) с командно-анализирующим устройством (КАУ) образует пеленгатор (координатор) ССН. Этот пеленгатор принимает и обрабатывает информацию о положении корабля-цели, которая позволяет выработать в системе управления (СУ) необходимые команды на изменение направления движения торпеды.
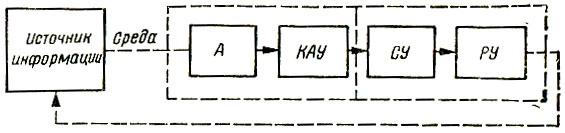
Рис. 22. Обобщенная структурная схема системы самонаведения
В качестве примера, поясняющего функциональную связь всех этих элементов, рассмотрим структурную схему пассивной акустической системы, работающей по равносигнальному методу.
Схема (рис. 23) содержит антенну (А), фазоамплитудный преобразователь (ФАП), на выходе которого формируются равносигнальные характеристики направленности (ХН), входной коммутатор (ВK), попеременно пропускающий к общему усилителю (ОУ) напряжения сигнала с первого (Е1) и второго (Е2) выходов ФАП, общий усилитель, блок детекторов (Д1, Д2), в котором выделяется напряжение регулярной огибающей высокочастотного шумового сигнала и напряжение автоматической регулировки усиления (АРУ), усилитель низкой частоты (УНЧ), отфильтровывающий и усиливающий напряжение огибающей, выходной коммутатор, синхронный детектор (СД) напряжения регулярной огибающей, балансный мост (БМ), блок коммутации (БK), вырабатывающий напряжения коммутации, релейно-исполнительную часть (РИЧ), систему управления (СУ), рули торпеды (РТ).
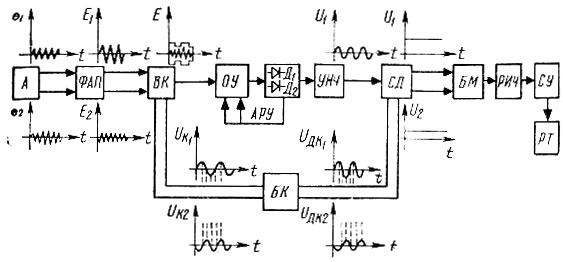
Рис. 23. Структурная схема одноканальной акустической аппаратуры самонаведения с коммутацией сигналов
Напряжения е1 и е2, полученные на выходах антенны, с одинаковыми амплитудами, но разными фазами, подаются в ФАП, на выходах которого в свою очередь образуются напряжения Е1 и Е2. Когда цель находится на равносигнальном направлении, то эти напряжения равны. В остальных случаях Е1≠Е2.
Напряжения Е1 и Е2 подаются на входной коммутатор, куда поступают и напряжения Uк1 и Uк2 от блока коммутации. ВК попеременно пропускает к ОУ напряжения E1 и Е2. Шумовой сигнал, амплитудно-модулированный частотой коммутации, содержит информацию о положении цели в фазе и амплитуде регулярной огибающей.
Затем этот сигнал усиливается в ОУ. Но поскольку амплитуда сигнала на входе ОУ может изменяться в широких пределах (в 104 и более раз), то ОУ имеет цепь автоматической регулировки усиления (АРУ), благодаря которой нелинейные искажения в ОУ отсутствуют.
Огибающая амплитудно-модулированного сигнала выделяется в блоке детекторов Д1, Д2, а затем усиливается и отфильтровывается в усилителе низкой частоты. После УНЧ напряжение огибающей подается в синхронный детектор, в который поступают также декоммутирующие Uдк1 и Uдк2 напряжения. Фаза напряжения регулярной огибающей может принимать два значения: 0 (|E1|>|Е2|) или π (|Е1|<|Е2|). Поэтому напряжения U1 и U2 на первой и второй нагрузках СД могут принимать различные значения: U1=U2U1>U2, U1<U2.Знак разности U=U1-U2 однозначно зависит от фазы напряжения огибающей, а, следовательно, и от положения цели относительно равносигнального направления.
Выходные напряжения СД подаются в БМ. В зависимости от знака разности ±U срабатывает одно из первичных поляризованных реле Р1 или Р2, которые вырабатывают первичные команды для релейно-исполнительной части ССН. В РИЧ первичные команды необходимым образом усиливаются, накапливаются во времени и перепроверяются, а затем передаются на систему управления, которая осуществляет перекладку вертикальных рулей торпеды.
Характерной особенностью системы этого типа является антенна, имеющая характеристику направленности в виде двух неподвижных взаимно пересекающихся лепестков (рис. 24).
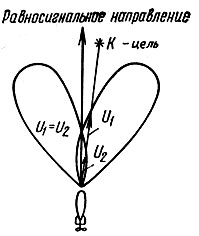
Рис. 24. Характеристика направленности антенны пассивной акустической аппаратуры самонаведения
Антенна состоит из двух узлов: блока преобразователей гидроакустических ультразвуковых колебаний, обмотки которых соединены между собой так, что приемники образуют две приемные группы, и фазоамплитудного преобразователя.
Для приема ультразвуковых колебаний, излучаемых кораблем, в АСН торпеды САЭТ-50 используются гидроакустические преобразователи магнитострикционного типа.
Из всех ферромагнитных материалов наибольшими магнитострикционными свойствами обладает никель. Он хорошо поддается механической обработке и мало подвержен коррозии, в связи, с чем его обычно и используют в магнитострикционных излучателях и приемниках.
Гидроакустические преобразователи атенны АСН торпеды САЭТ-50 представляют собой пакеты, набранные из никелевых пластин прямоугольной формы. Геометрические размеры пластин обеспечивают резонансную частоту 25 кГц.
Рабочие поверхности приемников шлифуются для получения необходимой частоты и уменьшения собственных шумов (рис. 25). Все четыре гидроакустических преобразователя антенны в торпеде САЭТ-50 имеют одинаковую форму и размеры, но отличаются количеством витков обмотки: крайние приемники имеют по четырнадцать витков, средние - по двадцать восемь. Обмотки преобразователей выполнены из специального гидроакустического медного провода.
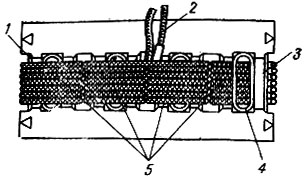
Рис. 25. Общий вид двадцативосьмивиткового магнитострикционного преобразователя: 1 - ножка преобразователя; 2 - обмотка из специального гидроакустического медного провода; 3 - ножка преобразователя, обернутая лакотканью; 4 - резиновая прокладка; 5 - обмотка приемников из четырех секций
Образование равносигнальной зоны в торпеде САЭТ-50 достигается размещением в головной части двух групп приемников, максимумы чувствительности которых смещены на некоторый угол относительно оси торпеды.
Когда источник шума (корабль-цель) находится на продолжении продольной оси торпеды, напряжения, поданные с выхода антенны на вход усилителя, одинаковы, создаваемая ими разность равна нулю и ток по обмоткам поляризованных реле не протекает. При отклонении же источника шума от оси торпеды на выходе усилительного устройства появляется разностное напряжение, которое вызывает ток в цепи поляризованных первичных реле.
Так как природа и характер шумов самой торпеды существенно не отличаются от природы и характера шумов корабля-цели, то в аппаратуре самонаведения помехи от сигналов отличаются по величине входных напряжений. Это означает, что чувствительность АСН должна иметь "порог", определяемый величиной, превышающей уровень шумов торпеды, т. е. аппаратура должна срабатывать только при входных напряжениях, уровень которых превышает уровень напряжений, создаваемых воздействием шумов торпеды.
Структурная схема аппаратуры самонаведения по кильватерному следу. В зарубежной печати сообщалось о разработке электрической торпеды Мк 45Ф для стрельбы по надводным целям. Ее модификация мод. 1 снабжена системой самонаведения по КС корабля. Принцип ее действия основан на определении разности фаз излучаемых и принимаемых акустических сигналов, возникающих в результате отражения от КС, насыщенной пузырьками воздуха. Эта система (рис. 26) наводит торпеду на атакуемую цель и подрывает торпеду при непосредственном контакте с нею.
Рис. 26. Структурная схема аппаратуры самонаведения по кильватерному следу: 1 - передатчик; 2 - излучатель; 3 - гидрофон; 4, 7 - усилители; 5 - фазовый детектор; 6 - защитный фильтр; 8 - второй детектор; 9 - интегратор; 10 - триггерная цепь; 11 - блок управления рулем торпеды
Передатчик 1 возбуждает излучатель 2, который формирует акустические колебания (сигнал) в окружающей водной среде. Одновременно сигнал от передатчика поступает на фазовый детектор 5. Акустические сигналы, отраженные от KС, принимаются гидрофоном 3 и через усилитель 4 также подаются на фазовый детектор 5, где сравниваются по фазе с сигналом передатчика.
Фазовый детектор формирует на выходе напряжение постоянного тока, пропорциональное фазовому углу между излучаемыми и принимаемыми сигналами. Далее это напряжение подается на защитный фильтр 6, который выделяет или подавляет флуктуации фазового угла или фазовой модуляции, возникающие при движении торпеды в водной среде вне пределов кильватерного следа.
Сигналы с фазовой модуляцией, превышающей определенный уровень, пропускаются через фильтр и усиливаются, а затем подаются на второй детектор 8, преобразующий пиковые значения фазовой модуляции. Напряжение постоянного тока, получаемое на его выходе, пропорционально положительным пиковым значениям сигналов, поступающих на вход.
С детектора сигналы подаются на интегратор 9, содержащий резисторноемкостную цепочку, постоянная времени которой выбирается с таким расчетом, чтобы исключить ложное срабатывание от сигналов помех малой длительности. Интегратор работает только тогда, когда на его входе появляются сигналы определенной длительности. В этом случае приводится в действие триггерная цепь 10, и система самонаведения не будет реагировать на ложные сигналы, но останется достаточно чувствительной и сможет принять сигналы, отраженные от KС. Триггерная цепь включает блок управления рулем торпеды 11, которая движется вдоль KС цели до контакта с ней.
Необходимо отметить, что явление рефракции - искривление звукового луча - является фактором, влияющим на дальность действия АСН.
Траектории движения торпед в режиме самонаведения. На догонных траекториях СН стремится удерживать вектор скорости или ось торпеды в направлении на Цель. На коллизионных же траекториях (с постоянным углом упреждения) между вектором скорости торпеды или осью торпеды и направлением на цель сохраняется некоторый неизменный угол. СН при пропорциональных траекториях стремится удерживать вектор скорости в направлении на точку упреждения, задаваемую решением торпедного треугольника.
Поскольку технически наиболее просто реализовать траекторию догонного типа, то такие системы и нашли наибольшее распространение, но были попытки использовать коллизионные траектории с постоянным углом упреждения, а также траектории, обеспечивающие наведение на цель по КС. Рассмотрим их более подробно.
Так, при движении торпеды САЭТ-50 под управлением АСН она сначала совершает циркуляцию в сторону корабля-цели до приведения его в пределы "мертвого угла", затем в течение 1,5 с движется по прямой. После этого торпеда ложится на циркуляцию в ту же сторону до получения сигнала с противоположного борта и вновь переходит на циркуляцию в сторону корабля-цели. Траектория догонного типа показана на рис. 27, а сглаженная без "акустической змейки" - на рис. 28, а. В этом случае торпеда настигает цель с кормы, проходя часть пути в КС, что ухудшает условия работы АСН.
Рис. 27. Траектория маневрирования торпеды с аппаратурой самонаведения по кильватерному следу
В случае самонаведения с использованием коллизионной траектории (рис. 28, б) торпеда движется таким образом, что угол р, образованный осью торпеды и направлением на цель, остается все время постоянным. Угол упреждения р является для данной системы либо строго определенным, либо выбирается перед выстрелом на основании данных о цели.
Непрерывное преследование цели без схода с кривой погони, возможно, при условии, что радиус кривизны в любой точке абсолютной траектории больше минимального радиуса циркуляции торпеды. Как только это условие нарушается, торпеда сходит с кривой погони и теряет акустический контакт с целью.
Торпеда ВМС США с аппаратурой самонаведения по КС Мк 45Ф мод. 1 обычно выстреливается так, чтобы ее траектория проходила за кормой цели, пересекая КС, и затем наводилась по нему на корабль. Как сообщалось, КС обнаруживается АСН на расстоянии до 2000 м от корабля-цели.
Варианты маневрирования торпеды с аппаратурой самонаведения по КС обеспечиваются программным устройством, в которое еще до выстрела вводятся данные о стороне движения цели. Это дает возможность произвести первый поворот в сторону цели и сблизиться с ней на оптимальном (30°) угле пересечения КС, каждый раз поворачивая торпеду в сторону цели.
При маневрировании, входя и выходя из КС, торпеда Мк 45Ф мод. 1 может пройти перед носом цели, не поразив ее. Если аппаратура самонаведения в положенное время не обнаружит КС, программное устройство переводит торпеду на поисковую циркуляцию для повторного его обнаружения.
В процессе второго поиска, когда программное устройство ведет торпеду на циркуляцию более чем на 315° и КС не обнаруживается, сторона поворота не меняется, что позволяет торпеде держаться в направлении цели.
Средства борьбы с самонаводящимися торпедами. Развитие и совершенствование гидроакустических средств в военно-морских флотах почти сразу же повлекло за собой создание обширного арсенала средств и способов противодействия их нормальной работе.
Противодействовать гидроакустическим средствам можно различными способами: маневрировать курсом, скоростью, глубиной погружения (подводные лодки), а также применять специальные помехи.
Мероприятия по защите от акустических самонаводящихся терпед (пассивная АСН), основанные на снижении шума корабля, сводятся к уменьшению его акустического поля, Для "засорения" приемных устройств АСН создаются преднамеренные (искусственные) помехи, которые в сочетании с естественными уменьшают чувствительность приемников. Наконец, создаются специальные имитаторы шумов большой интенсивности (ложные цели), источник которых располагается либо на достаточном удалении от истинной цели, либо автономно движется в сторону от нее.
В ряде капиталистических государств при постройке ПЛ их корпус покрывают гладким звукопоглотителем из относительно тонкой пористой резины. Звук, падающий на покрытие, вызывает резонансные колебания стенок воздушных полостей в резиновом слое. При этом звуковая энергия в основном переходит в теплоту, а отражается лишь небольшая ее часть. Другой тип гладкого противогидролокационного покрытия состоит из двух склеенных слоев резины толщиной по 2 мм. Внешний лист - сплошной, а внутренний - со сквозными круглыми отверстиями различного диаметра. Воздушные полости, образуемые отверстиями, поглощают энергию ультразвуковых колебаний.
Как уже говорилось, один из эффективных методов активного противодействия самонаводящимся торпедам заключается в создании сильного шума в удалении от корабля. В качестве источников шума возможно использование буксируемых излучателей с механическим или электрическим приводом - акустических охранителей, которые могут располагаться в 200...250 м за кормой корабля. Акустическое поле такого охранителя по спектру аналогично шумам корабля, но интенсивнее их в несколько раз. Благодаря этому торпеда и наводится не на корабль, а на излучатель.
По сообщениям зарубежной печати, американские военно-морские силы применяют несколько разновидностей приборов помех. Так, дрейфующий прибор массой 45 кг имеет форму цилиндра высотой 762 мм и диаметром 235 мм. Электрические батареи, электролитом в которых служит морская вода, обеспечивают его работу в течение 15 мин. Самоходный прибор массой 41 кг выполнен в форме малогабаритной торпеды длиной 2365 мм и диаметром 254 мм. Он движется в течение 15 мин со скоростью 11...12 м/с (6...7 уз) и может изменять направление до 30° по отношению к первоначальному. Стационарный прибор размещается непосредственно на ПЛ и питается от бортовой электросети, поэтому длительность его работы не ограничена.
Эффективным СГПД иностранные специалисты считают также имитаторы ПЛ, образующие в воде концентрированное облако из газовых пузырьков, которые хорошо отражают акустические посылки гидролокаторов кораблей и АСН торпед. Газовые пузырьки создаются имитационными патронами в результате реакции гидро-реагирующего вещества с морской водой.
СГПД постоянно развиваются и совершенствуются. Сейчас в ВМС стран НАТО появились имитаторы ПЛ, которые представляют собой сложные технические устройства. Они могут имитировать шумы ПЛ и отраженные от ее корпуса эхо-сигналы, воспроизводить некоторые другие физические поля, а также создавать КС.
Зарубежные военно-морские специалисты считают, что в военное время имитаторы могут использоваться как эффективное ГСПД, отвлекающее на себя самонаводящиеся торпеды, в мирные же дни - как средство обеспечения боевой подготовки противолодочных сил.
На вооружении американского флота состоит самоходный имитатор типа AN/BLQ-9. Он выполнен в виде ралогабаритной торпеды массой 156 кг, длиной 3350 мм диаметром 254 мм. Прибор может маневрировать на глубинах от 15 до 122 м со скоростью хода 14,8...18,5 км/ч (8...10 уз) в течение 2 ч. По курсу и глубине он управляется по заранее составленной и нанесенной на стандартную перфоленту программе. Шумы, создаваемые им в диапазоне частот 0,1...10 кГц, обнаруживаются на расстояниях до 4...5 км. Для повышения достоверности имитации эхо-сигнала в частоту переизлучаемой посылки вносится сдвиг, который соответствует доплеровскому, возникающему при отражении посылки от ПЛ, идущей со скоростью 3,7...11,1 км/ч (2...6 уз).
Другой имитатор Мк 30 маневрирует не только по курсу и глубине, но и по скорости хода. Перфолента с программой маневрирования может готовиться на корабле непосредственно перед использованием СГПД с учетом конкретной обстановки.
Для имитации магнитного поля ПЛ служит прибор, буксирующий медный кабель длиной 30 м, через который пропускается электрический ток. На конце кабеля располагается акустический излучатель, предназначенный для отвлечения противолодочных самонаводящихся торпед.
Английский самоходный имитатор подводных лодок снабжен индикатором промаха, который совместно с гидроакустическим ответчиком, устанавливаемым при практических стрельбах в торпедах, позволяет замерять и записывать на магнитную ленту текущее расстояние от торпеды до прибора.
Многие известные СГПД разрабатывались за рубежом для подавления корабельных средств наблюдения и лишь небольшая их часть - для противодействия ССН торпед. Однако отмечалось, что почти все СГПД универсальны, т. е. пригодны для противодействия как гидроакустическим средствам наблюдения кораблей, так и ССН торпед.
В заключение необходимо отметить, что создание СГПД в свою очередь повлекло создание устройств, обеспечивающих защиту от них. Такими устройствами явились системы телеуправления торпедами. В этом еще раз проявляется диалектическая закономерность единства и борьбы средств нападения и средств защиты.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'