6. Телеуправление в торпедном оружии
Еще в 1887 г. в докладной записке Морскому техническому комитету поручик русской армии Немира писал: "Честь имею представить комитету описания... предлагаемой мной мины... Два руля, горизонтальный и вертикальный, приводятся в движение посредством электромагнитов, проводники к коим в форме кабеля разматываются автоматически во время движения мины с двух катушек: одной, находящейся в самой мине, другой на берегу или судне, в аппаратуре для спуска мины. Управление производится с помощью клавишей".
Однако существовавший уровень развития технологии не позволил реализовать изобретение.
В 1892 г. в США использовали идею Немиры в телеуправляемой торпеде "Симс-Эдисон". Она приводилась в движение электроэнергией, подаваемой со стреляющего корабля по кабелю длиной 4100 м. Одновременно кабель служил для передачи команд управления курсом торпеды и подрыва заряда ВВ при сближении с целью. Для удержания на заданной глубине торпеда крепилась к медному поплавку, наполненному пористым веществом.
Подобные торпеды были приняты на вооружение русского и американского флотов, но вследствие дороговизны, технической сложности и низкой надежности от них вскоре отказались.
О возможности телеуправления торпедами снова вспомнили только в ходе второй мировой войны после появления такого эффективного средства противодействия самонаводящимся торпедам, каким явился прибор "Фоксер". В конце войны в немецкой торпеде "Лерхе" корректуру траектории стали осуществлять с помощью системы телеуправления. Для этого торпеду соединили со стреляющей ПЛ многожильным кабелем длиной 6000 м, сматывание которого с торпедной катушки происходило через пустотелый вал двигателя. Торпеда имела максимальную скорость 55, км/ч (30 уз).
Пассивная акустическая головка самонаведения обеспечивала пеленгацию цели по максимуму на частоте 35 кГц. С помощью кабеля гидрофон подключался к наушникам оператора, находящегося на подводной лодке. Оператор, обнаружив шумы корабля-цели, подавал на рулевую машинку торпеды сигналы для разворота ее в направлении, обеспечивающем совмещение оси торпеды с целью.
Система телеуправления и гидроакустическая аппаратура позволили подводным лодкам скрытно выходить в атаку, поскольку отпала необходимость всплытия под перископ для определения элементов движения цели. Применение в торпеде электродвигателя обеспечило бесследность ее движения.
Примечательно, что принцип, на котором было основано телеуправление в проекте поручика Немиры, сохранился неизменным до настоящего времени.
В системах телеуправления информация о положении корабля-цели относительно торпеды анализируется на атакующем корабле (рис. 29). В торпеде имеется только система управления, которая обеспечивает корректировки курса торпеды по командам, передаваемым с атакующего корабля по проводам.
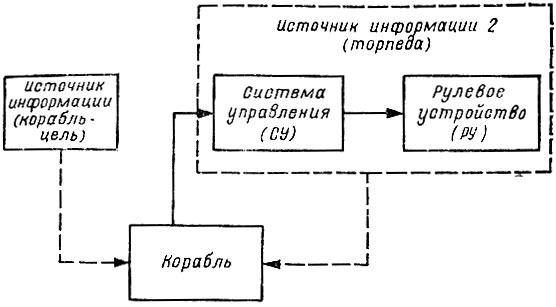
Рис. 29. Обобщенная структурная схема системы телеуправления
Для повышения точности попадания в цель система телеуправления может комбинироваться с ССН, обеспечивающей увеличение точности наведения на конечном участке сближения торпеды с целью. Команды управления, формируемые в виде электрических сигналов на корабле-носителе, передаются в торпеду с помощью проводной линии связи.
На стреляющем корабле размещены гидроакустический комплекс, предназначенный для обнаружения цели и определения элементов ее движения. Определение текущих координат торпеды в свою очередь может быть осуществлено методом непосредственного измерения пеленга на торпеду или методом счисления.
Координаты цели, торпеды, а также курс и скорость атакующего корабля вводятся в счетно-решающий комплекс, который по этим данным вырабатывает курс торпеды, обеспечивающий ее встречу с целью.
Команды управления, вырабатываемые счетно-решающим комплексом, поступают в пульт управления и после преобразования в электрические сигналы и их усиления передаются в торпеду по проводу. Здесь сигналы управления вновь усиливаются, преобразуются в командные напряжения и подаются на приборы курса и глубины. Прибор курса (ПК) приводит в действие рулевую машинку, которая перекладывает вертикальные рули, в результате чего торпеда изменяет свой курс. Аналогично корректируется и глубина хода. Так, в торпеде Мк 37 команды передаются в виде импульсов тока низкой частоты: одному импульсу соответствует изменение курса торпеды на 2...5° или глубины хода на 3...5 м.
Во время движения провод разматывается с торпедной катушки, установленной между приборным и кормовым отделениями торпеды. В торпедах ВМС США, например Мк 37, провод выводится через специальную трубку на вертикальном стабилизаторе. Часть провода размещается на катушке (вьюшке), находящейся на стреляющем корабле.
Как описывается в западной печати, корабельная буксируемая катушка 1 выстреливается с ПЛ вместе с торпедой и затем буксируется на специальном кабель-тросе 3 длиной около 30 м (рис. 30). На надводном корабле катушка крепится к наружному борту в кормовой части (рис. 31). После выстреливания провод от торпедного аппарата переводится к кормовой катушке специальным направляющим устройством. Натяжение, возникающее в результате движения стреляющего корабля, компенсируется сматыванием провода с корабельной катушки, что обеспечивает кораблю свободу маневра.
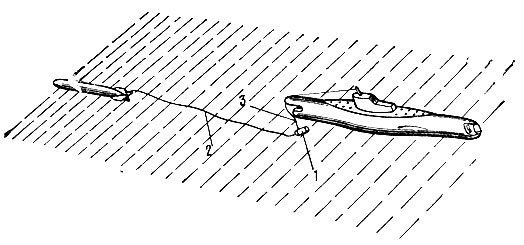
Рис. 30. Схема управления движением торпеды с подводной лодки по проводу: 1 - вьюшка с проводом; 2 - провод; 3 - бронированный кабель
Точность наведения торпеды зависит в основном от дистанции до цели и величины ошибок в определении ее координат гидроакустическим комплексом. При дальности стрельбы около 20 км торпеда может отклониться от цели на несколько сотен метров.
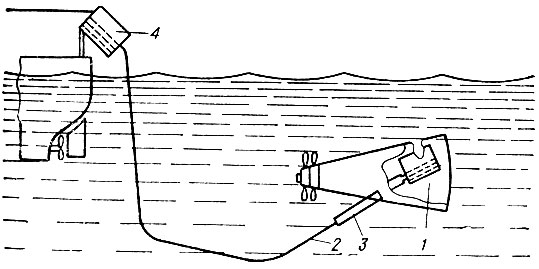
Рис. 31. Схема управления движения торпеды с надводного корабля по проводу: 1 - торпедная вьюшка с проводом; 2 - провод; 3 - трубка; 4 - корабельная вьюшка с проводом
Телеуправляемые самонаводящиеся торпеды некоторых стран НАТО большую часть своего пути проходит, подчиняясь командам со стреляющего корабля. При подходе к цели по проводу подается сигнал перевода торпеды ' в режим поиска АСН. В дальнейшем торпеда управляется только по командам АСН.
Важную роль при телеуправлении играет линия связи между торпедой и носителем. Основное назначение такой линии - обеспечить возможность двухсторонней передачи информации (команд, сигналов) между носителем и торпедой.
Наиболее распространенный вид линии связи для телеуправляемых торпед - одножильный кабель с использованием морской воды в качестве второго проводника. Исключение составляет проводная линия связи итальянской торпеды "Кангуро", состоящая из семи жил.
Управление по проводу на участке сближения с целью может осуществляться методом совмещения или методом наведения в упрежденную точку.
В первом случае оператор, наблюдая на электронном отметчике за взаимным положением цели, торпеды и стреляющего корабля, с помощью кнопочного переключателя подает команды управления так, чтобы все три объекта были на одной прямой линии.
Во втором случае торпеда выстреливается в расчетную точку встречи с целью. По мере уточнения курса и скорости хода цели счетно-решающий комплекс вырабатывает команды управления для поворота торпеды на курс, проходящий через скорректированную точку ее встречи с целью.
Наглядность решения задачи торпедной стрельбы достигается с помощью специального электронного отметчика, представляющего собой оптическое проецирующее устройство, на экране которого отображается положение цели и торпеды относительно стреляющего корабля.
По взглядам зарубежных специалистов, телеуправление обеспечивает более высокую вероятность поражения цели по сравнению с другими способами управления и менее подвержено воздействию преднамеренных помех. В связи с этим телеуправляемые торпеды приобретают определенное значение в системе вооружения подводных лодок и надводных кораблей стран НАТО.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'