V. Наведение управляемого оружия на цель
Управляемые снаряды и ракеты являются, как правило, только элементами целой системы оружия. Помимо самих снарядов и ракет, в эти системы входят стартовый комплекс, комплекс наведения и комплекс вспомогательного оборудования.
Устройства, входящие в стартовый комплекс управляемых снарядов и ракет, могут быть наземными и подземными, неподвижными и подвижными. За рубежом стремление обеспечить безопасность этих устройств приводит к усиленному строительству подземных или подвижных стартовых устройств*. Подземные стартовые позиции в США проектируются для стратегических баллистических ракет "Титан", "Минитмэн", "Блю Стрик", для противоракетных ракет "Ника-Зевс" и др.
*("Флайт" № 2643.)
Как должно выглядеть, например, подземное стартовое устройство для ракеты "Титан"? Это - главная шахта глубиной 50 м, к которой посредством 12-метровых соединительных туннелей примыкают две дополнительные шахты. В главной шахте находится полностью собранная ракета, установленная в вертикальном положении. С помощью подъемника стартовая установка и ракета перед запуском выдвигаются на поверхность. В дополнительных шахтах находятся средства заправки ракеты под землей и различное вспомогательное оборудование.
Девять таких подземных стартовых устройств, удаленных друг от друга на несколько сот метров, составляют одну ракетную базу (эскадрилью). На каждые три стартовых устройства предусматривается свой центр управления.
Помимо этого, в базу входят еще 12 заглубленных до 20 м подземных помещений для складов, электростанций и аппаратуры радиолокаторов. Стоимость одной такой базы достигает 100 млн. долларов, не считая стоимости ракет. Одна ракета стоит более 2 млн. долларов.
Стратегические ракеты "Минитмэн" в США предполагается запускать не только со стационарных подземных баз, но и с железнодорожных платформ, курсирующих в составе специальных поездов на железнодорожных магистралях страны по специальному расписанию.
Рис. 25. Запуск баллистической ракеты 'Поларис'
Ракеты средней дальности "Поларис" (рис. 25) планируется запускать со стационарных баз и подводных лодок с атомными двигателями водоизмещением в 5 600 г как из надводного, так и из подводного положений. В последнем случае ракета помещается в подводной лодке внутри вертикальной шахты. Из шахты она выбрасывается давлением инертного газа на высоту 24 м выше уровня воды. При этом от ракеты отделяется герметизирующая заглушка и последовательно включаются двигатели первой, затем второй ступеней. В дальнейшем от нее отделяются первая и вторая ступени, и она летит по баллистической траектории, как и любая другая баллистическая ракета. Боевая головка, несущая ядерный заряд, возвращается в атмосферу с гиперзвуковой* скоростью.
*(Гиперзвуковой называется скорость полета, превышающая 5 скоростей звука.)
Система оружия в данном случае состоит из подводной лодки-ракетоносителя, оборудованной корабельной системой навигации для точного определения местоположения лодки в океане, и шестнадцати ракет, имеющих бортовую инерциальную* систему наведения. При этом еще до пуска ракеты корабельная система выдает в бортовую систему все исходные данные о траектории полета.
*(Об инициальной системе наведения см. стр. ниже).
Самолеты-снаряды со своей бортовой аппаратурой наведения также являются элементами системы, в которую входят самолет-носитель с его навигационно- бомбардировочной аппаратурой, а иногда еще и наземные центры наведения. Например, самолет-снаряд "Хаунд Дог" может принимать данные наведения из центра стратегической авиации.
Управляемые снаряды воздушного боя входят в систему, которая включает самолет-носитель, наземные радиолокационные станции для дальнего обнаружения воздушных целей и наземное радиотехническое оборудование для выведения самолета-носителя в такое положение, из которого летчик может вести прицельную стрельбу.
Система противоракетного оружия США состоит из зенитных ракет "Ника-Зевс"; подземных стартовых устройств; радиолокатора для обнаружения боевых головок баллистических ракет; наземного вычислителя для предварительного определения их траектории; радиолокатора для сопровождения, как цели, так и выпущенной антиракеты; средств радиосвязи между наземным вычислителем и антиракетой и т. д.
Наряду с зенитными ракетами, запускаемыми со стационарных баз ПВО ("Ника", "Бомарк", "Бладхаунд"), многие зенитные ракеты предназначены для применения с подвижных установок и надводных судов ("Хоук", "Террьер", "Талос", "Тартар"). А такие зенитные ракеты, как "Ред Ай", запускаются с ручных пусковых устройств типа "базука", обслуживаемых одним-двумя солдатами.

Рис. 26. Тактическая баллистическая ракета 'Сержант' на транспортере-подъемнике
Самоходные или передвижные пусковые устройства применяются для всех зарубежных крылатых ракет. Подвижными, а в ряде случаев и самоходными являются также стартовые устройства тактических баллистических ракет (рис. 26). Все стартовые устройства противотанковых снарядов - подвижные. Особый интерес представляет запуск этих снарядов с вертолетов (рис. 27).

Рис. 27. Вертолет Белл Н1А, вооруженный шестью управляемыми противотанковыми снарядами S. S. 11 'Норд'
В начале этой брошюры мы говорили о том, что для управления снарядом или ракетой надо "видеть" как цель, так и выпущенный снаряд до момента их встречи. Ознакомившись с полетом различных видов управляемых снарядов и ракет, несколько уточним это положение. Нужно ли, например, видеть цель, чтобы послать туда баллистическую ракету? Оказывается, нет. Нужно только знать точные координаты цели и рассчитать начальную скорость V0, угол бросания Θ0 и ту точку О, в которой ракета начнет свой баллистический полет. Если эти данные рассчитаны точно, ракета неизбежно придет к цели.
Следовательно, в случае стрельбы баллистическими ракетами выражение "видеть цель" надо понимать не буквально. Надо, если можно так выразиться, точно попасть лишь в точку О, а далее законы небесной механики "доведут" ракету до пункта назначения.
Не обязательно видеть цель и при запуске крылатых ракет. Но нужно знать направление к цели и определить ту точку, в которой ракета должна перейти в пикирование.
Вообще выражение "видеть" (не обязательно визуально) относится только к снарядам и ракетам, находящимся, как и цель, в пределах дальности действия средств наблюдения. К этой категории относятся почти все зенитные ракеты, управляемые снаряды воздушного боя, противотанковые снаряды и ряд самолетов-снарядов. Но когда цель находится за пределами этой дальности, попадание может быть обеспечено не тем, что она видна, а тем, что снаряд или ракета идут по "правильной дороге", или, как принято говорить, выдерживают расчетную траекторию своего движения. Наводить снаряд или ракету в широком смысле этого слова значит управлять их движением посредством посылки команд на рулевые устройства.
Любой летательный аппарат, если его рассматривать в виде массы, сосредоточенной в одной точке (в центре тяжести), имеет, как иногда, говорят, три степени свободы линейных перемещений, Он может двигаться вдоль трех взаимно-перпендикулярных направлений (рис. 28): вперед-назад, вправо-влево и вверх-вниз. Если обозначить эти направления через х, z и у, то мы можем убедиться, что любое произвольное перемещение точки А по пространственной кривой в точку А' складывается из перемещения х' вдоль оси х, z', вдоль оси z и у1 вдоль оси у.
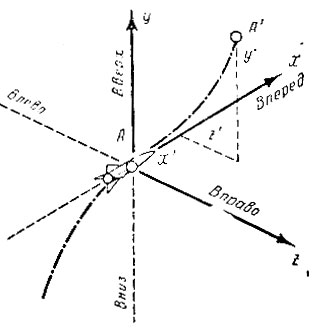
Рис. 28. Возможные направления движения снаряда
Всякий снаряд после пуска движется вперед (вдоль оси х). Чтобы он попал из точки А в точку А'. ему надо переместиться еще вправо и вверх. Это может быть обеспечено установкой рулей в двух взаимно-перпендикулярных или перекрещивающихся плоскостях. Руль в вертикальной плоскости будет служить рулем поворота, а в горизонтальной - рулем высоты.
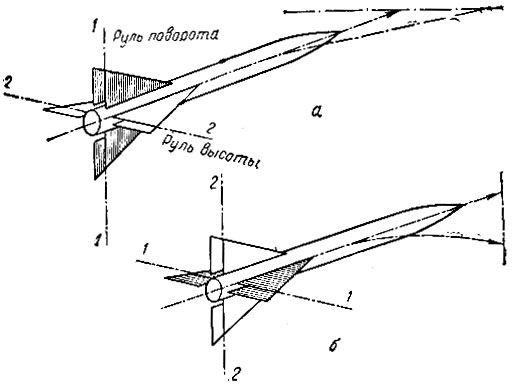
Рис. 29. Перемена действия рулей снаряда
Однако в действительности летательный аппарат не является массой, сосредоточенной в центре тяжести. Он, имеет значительные размеры, разнесенные вокруг этого центра. Поэтому он может двигаться не только вдоль трех осей, как точка, но и вращаться вокруг своего центра тяжести. Любое произвольное вращение снаряда может быть представлено суммой вращений относительно трех взаимно-перпендикулярных осей. Вращение вокруг продольной оси называется кренением, вокруг вертикальной - рысканьем и вокруг боковой оси - тангажем.
Из этого следует, что для управления движением сна" ряда посредством отклонения рулей надо иметь ясное представление о том положении, которое в данный момент он занимает, или предварительно стабилизировать его в каком-то определенном положении. В противном случае нельзя определить, какие именно рули и на какой угол надо отклонять. Более того; может произойти искажение или даже перемена действия рулей.
Поясним это примером. Пусть нам необходимо довернуть вправо снаряд, изображенный на рис. 29,а. Даем команду на руль поворота 1 - 1. Руль в соответствии с командой отклонится вправо и снаряд повернется именно туда, куда мы хотели. Если же снаряд перед подачей команды оказался повернутым вокруг продольной оси (положение б), то та же (команда на тот же руль 1 - 1 даст совершенно иной результат. Снаряд довернется не вправо, а устремится вниз. Оказывается, в данном положении нужно было дать команду не на руль 1 - 1, а на руль высоты 2 - 2.
Не углубляясь пока в дальнейшее объяснение, отметим, что управлять снарядом или ракетой - это значит управлять не только его движением, но и его положением.
Какие же виды рулевых устройств применяются для управления снарядами и ракетами? При движении их в воздухе ими можно управлять посредством обычных аэродинамических рулей, которые применяются на дозвуковых самолетах. Отклонение аэродинамического руля, расположенного на задней кромке неподвижной несущей поверхности, приводит к изменению характера ее обтекания воздухом и к изменению в результате этого подъемной силы.
При сверхзвуковой скорости рули такого типа малоэффективны, так как их отклонение перестает влиять на характер обтекания несущих поверхностей. В этом случае применяются управляющие поверхности, отклоняемые целиком. Так, на сверхзвуковых самолетах вместо отклоняемого руля высоты широко применяется управляемый стабилизатор. На управляемых снарядах применяются крестообразные поворотные поверхности, расположенные чаще всего впереди крыла. Иногда поворотным является и само крыло.
Для управления на дозвуковых скоростях могут использоваться интерцепторы (прерыватели потока), имеющие вид пластин, расположенных поперек набегающего потока воздуха на верхней или нижней поверхности крыла или оперения. Эти пластины все время вибрируют в прорези крыла около какого-то среднего положения, выступая над поверхностью больше или меньше. Смещение среднего положения приводит к изменению характера обтекания крыла потоком воздуха и, как следствие, к изменению подъемной силы, что и используется для целей управления. На околозвуковых и сверхззуковых скоростях интерцепторы значительно снижают свою эффективность и увеличивают сопротивление летательного аппарата.
При движении с очень малой скоростью (например, сразу после старта баллистической ракеты) аэродинамические рули неэффективны. Очевидно, что бесполезны они и в безвоздушном пространстве. Поэтому на управляемых снарядах и ракетах часто используют так называемые газовые рули, предложенные К. Э. Циолковским, т. е. рули, установленные на пути реактивной струи, вытекающей из сопла работающего двигателя. Эти рули могут действовать только тогда, когда работает двигатель, т. е. на активном участке траектории, Разновидностью газовых рулей являются дефлекторы струи, т. е. приспособления в виде отражателей около реактивного сопла двигателя, позволяющие изменять направление выхлопной струи.
На активном участке управлять полетом можно посредством изменения направления тяги двигателя, прикрепляемого к корпусу ракеты на шарнирах. Разновидностью такого управления является управление посредством раздельной регулировки тяги двигателей, если их несколько и они расположены по разным сторонам от оси ракеты.
Управлять ракетой можно и с помощью двигателей, специально созданных для этой цели. Их называют верньерными. Это небольшие ракетные двигатели, служащие для точной "настройки" положения и скорости ракеты. Например, на ракетах "Атлас" и "Тор" имеется по два таких двигателя, а на ракете "Титан" - четыре. Они снабжаются тем же топливом, что и основные двигатели, но, поскольку имеют отдельные баки, могут действовать и тогда, когда основные двигатели закончили работу. Таким образом, имеется возможность корректировать небольшие отклонения ракеты даже на пассивном участке полета.
Верньерные двигатели развивают постоянную тягу, и каждый из них может отклоняться относительно двух осей, что обеспечивает управление положением ракеты относительно всех трех осей. Роль таких двигателей могут исполнять и реактивные сопла, работающие на сжатом воздухе или парогазе, который образуется при разложении перекиси водорода.
Ракеты малой дальности могут совсем не иметь управления после их запуска. Каждая такая ракета наводится на цель подобно артиллерийскому орудию - поворотом и наклоном стартовой установки - и в полете стабилизируется вращением вокруг продольной оси. Вращение создается при этом специальными двигателями или скошенным оперением.
Перечисленные выше рулевые устройства применяются в различных комбинациях в зависимости от устройства и назначения ракет*.
*(См. таблицу в конце.)
Для отклонения рулевых устройств на зарубежных управляемых снарядах служат различные виды приводов: пневматические, гидравлические, электромагнитные и механические. Приводы пулей выполняют команды наведения, поступающие на снаряд или ракету.
Где же вырабатываются команды наведения и как они передаются на борт летательного аппарата, а затем на приводы рулей? Известны три основных метода наведения управляемых снарядов и ракет: автономное наведение, теленаведение и самонаведение.
Автономным называется наведение посредством команд, которые вырабатываются на борту снаряда или ракеты. При этом летательный аппарат после пуска не получает извне никакой информации о цели или режиме полета. В этом случае вся бортовая аппаратура наведения работает только в соответствии с программой, записанной тем или иным образом (например, на магнитной ленте) и помещенной на борту летательного аппарата перед его пуском. Очевидно, в этом случае на борту должны быть устройства: для определения фактического режима полета, для запоминания и "считывания" заданной программы, для сравнения фактического режима о заданным и, наконец, для выработки таких команд органам управления, которые приводят к полному соответствию заданного и фактического режима полета.
Так как программа составляется и записывается до пуска снаряда, то ясно, что наводиться на движущуюся цель он не может. Ведь, записывая программу заранее, нельзя точно предугадать, когда и куда переместится цель. Невозможно также перенацелить такой снаряд после запуска, потому что после того как он сойдет с пускового устройства, с ним не поддерживается никакой связи ни с земли, ни с выпустившего его носителя.
Аппаратура автономного наведения не подвержена влиянию извне и поэтому абсолютно помехоустойчива, Снаряд с автономным наведением не может быть "отвлечен" на какую-нибудь ложную цель.
Автономное наведение может быть осуществлено разными техническими способами. Наибольшее распространение получила так называемая инерциальная система, которую точнее было бы называть гироинерциальной, поскольку она основана на использовании сил инерции и свойств гироскопа.
Основой всякой инерциальной системы является блок акселерометров-измерителей ускорения. Каждый акселерометр измеряет ускорение только в одном направлении. Поэтому блок состоит из трех акселерометров, оси которых взаимно-перпендикулярны. Измерения ими трех составляющих ускорения дают полное представление об ускорении снаряда или ракеты.
Для наведения баллистической ракеты необходимо строго выдерживать величину скорости в конце активного участка ее полета. Для наведения крылатой ракеты, кроме того, надо знать еще и пройденный ею путь. Как известно, в равномерно-ускоренном движении скорость тела в любой момент времени равна:
V = V0 + a · t,
где V - скорость в момент времени t;
V0 -скорость в начале движения;
а - ускорение;
t -время движения.
Перед стартом ракета неподвижна. Следовательно
т. е, скорость ее равна ускорению, умноженному на время движения. Если установить на ракете акселерометры, измеряющие ускорение, и часы, измеряющие время, то при наличии вычислителя можно всегда иметь представление о скорости ее движения.
Однако движение баллистической ракеты не равномерно ускоренное. Величина ускорения при разгоне все время возрастает. Поэтому, чтобы получать представление о точной скорости, надо измерять текущее ускорение за каждый бесконечно малый промежуток времени и, вычисляя бесконечно малые приросты скорости, суммировать их в течение всего активного полета. Суммирование бесконечно малых величин называется интегрированием.
Для того чтобы вычислять скорость путем интегрирования замеренных ускорений, каждый акселерометр имеет свой интегратор. Если, кроме этого, требуется вычислять и пройденный ракетой путь, то используют вторые интеграторы-интеграторы скорости, ведущие подсчет пути, пройденного по каждому из трех направлений, Как известно, пройденный путь равен произведению скорости движения на время. Вторые интеграторы предназначаются для того, чтобы суммировать бесконечно малые приращения пути.
Свои показания акселерометры дают в виде выходного электрического напряжения. Выходное напряжение первых интеграторов пропорционально скорости, а выходное напряжение вторых интеграторов пропорционально пройденному пути. Напряжение можно снимать с интеграторов и преобразовывать в отклонение стрелки на указателях скорости и пройденного пути или передавать в вычислитель в виде сигнала. Сравнивая эти сигналы с той скоростью или тем путем, который записан в программе, вычислитель определяет момент, когда надо выключить двигатели, разгоняющие баллистическую ракету, или когда крылатой ракете надо переходить в пикирование на цель.
Практически иностранные вычислители иногда устроены таким образом, что все время ведут подсчет промаха, который совершит ракета, если на ней в данный момент времени выключить двигатель или перевести в пикирование крылатую ракету*. По мере полета ракеты величина промаха все время убывает. Когда подсчитанный промах становится равным нулю, подается команда на выключение двигателя или перевод ракеты в пикирование.
*("Джед пропалшн" № 1, 1958.)
Но, как было уже сказано, ракета может поворачиваться относительно своего центра тяжести. Если блок акселерометров жестко связать с корпусом ракеты, то в таком случае можно получить только представление о величине скорости (или пройденного пути), но направление скорости (или пути) в пространстве останется неизвестным.
Поэтому блок акселерометров не связывается жестко с ракетой, а устанавливается в ней на платформе, которая при помощи трех гироскопов с взаимно-перпендикулярными главными осями сохраняет неизменное положение в пространстве. Платформа крепится к корпусу ракеты посредством системы кардановых колец и называется гиростабилизированной.
Описанная система схематично изображается на рис. 30. Гиростабилизированная платформа позволяет судить не только о направлении скорости (или пути) ракеты в пространстве, но и о положении корпуса ракеты. При этом можно ставить задачу не допустить поворота корпуса ракеты относительно этой платформы, например, стабилизировать ее по крену или рысканью. Можно также менять положение корпуса ракеты относительно платформы по заданной программе, например менять угол тангажа.
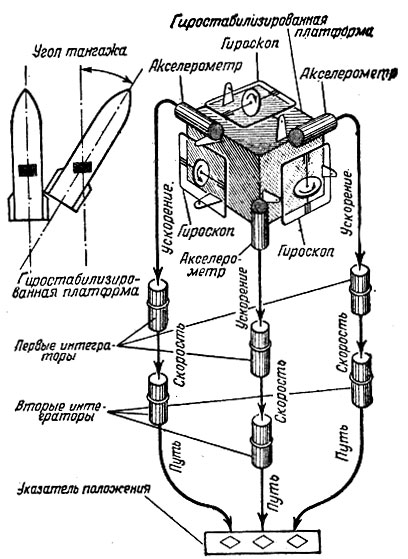
Рис. 30. Блок акселерометров, гиростабилизированная платформа и интеграторы
Таким образом, основными элементами гироинерциальной системы являются блок акселерометров, гиростабилизированная платформа, часы, запоминающее программу устройство и вычислитель, вырабатывающий команду рулям. Помимо этого, в систему может включаться вычислитель ускорения земного притяжения, потому что оно различно по величине и направлению для разных точек пространства, проходимых снарядом, что влияет на показания акселерометров. Кроме того, если ракета летит долго, гиростабилизированная платформа требует коррекции. Например, на крылатой ракете "Снарк", которая летит около 10 часов, гиростабилизированная платформа периодически корректируется астрономическим устройством.
Теленаведением (наведением на расстоянии) называется метод, при котором команды вырабатываются вне снаряда или ракеты и передаются на них по линиям связи. Наиболее часто за рубежом применяются два способа теленаведения: командный и по лучу.
Основными элементами командной системы наведения являются станция наведения (находящаяся на земле, корабле, самолете и т. п.), аппаратура управления, установленная на борту снаряда или ракеты, и линии связи между ними.
Станция наведения (рис. 31) включает в себя устройства для наблюдения за целью и снарядом, вычислитель и передатчик команд. Бортовая аппаратура предназначена для приема этих команд и отклонения рулевых органов.
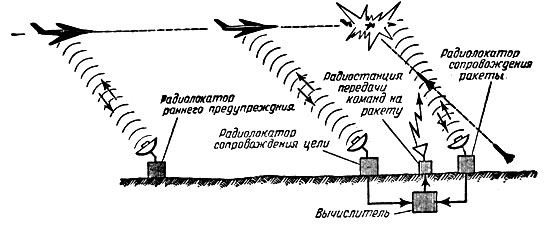
Рис. 31. Командное теленаведение
Станция наведения может получать информацию о цели и снаряде путем наблюдения визуальными или оптическими способами, следить, например, за танком противника и пущенным противотанковым управляемым снарядом. Она может получать информацию и посредством приема отраженных импульсов при облучении цели я снаряда радиолокаторами; таким путем следят, например, за самолетом и выпущенной против него зенитной управляемой ракетой. В этом случае задача оператора наведения или автоматического вычисляющего устройства состоит в том, чтобы вырабатывать такие команды, которые приводят ракету в цель. Чтобы цель и ракета совместились не только в плоскости, но и в пространстве, при помощи радиолокаторов измеряется также высота полета цели и ракеты. При этом используется такой весьма существенный технический прием, как "захват" облучаемого объекта. Если сначала радиолокатор ищет цель, то после ее обнаружения он может быть переведен на режим автоматического сопровождения цели. При этом антенна радиолокатора и его луч все время остаются направленными на нее.
При пуске противотанкового снаряда команды наведения передаются на снаряд по проводам, при пуске зенитной ракеты - по радио. Возможно командное наведение и в том случае, когда цель наблюдается не посредственно со станции наведения, а с самого снаряда (например, посредством телевизионной камеры). Результаты наблюдения передаются со снаряда на станцию наведения, где вырабатываются соответствующие команды. Очевидно, в этом случае связь между снарядом и станцией наведения должна быть двусторонней, На снаряде должен быть телевизионный передатчик и приемник команд, а на станции наведения - передатчик команд и телевизионный приемник.
Способ наведения по лучу, в отличие от командного, требует только одного радиолокатора на станции наведения. Таким способом наводятся, например, снаряды воздушного боя. Узкий луч электромагнитной энергии, исходящей от радиолокатора, приводится во вращение вокруг направления на цель. При этом вдоль направления на цель образуется так называемая равносигнальная зона (рис. 32). Когда луч находится в положении А, на снаряд приходит энергия, пропорциональная отрезку а. Когда луч поворачивается в положение Б, на снаряд приходит энергия, измеряемая отрезком б. Бортовая аппаратура снаряда устроена таким образом, что дает команды на рули снаряда, доворачивающие снаряд на направление, в котором энергия, приходящая от луча в положении А и луча в положении Б, одинакова. Этим направлением и является ось вращения луча, т. е. направление на цель.
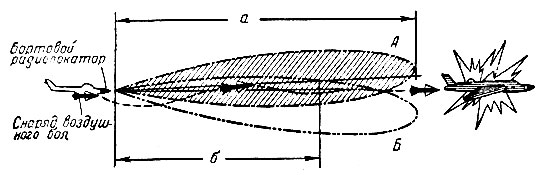
Рис. 32. Наведение по лучу (по равносигнальной зоне)
Для того чтобы снаряд после его пуска попал в луч радиолокатора, на первом участке своей траектории он должен управляться по определенной программе.
Одновременно с узким лучом радиолокатор излучает и широкий луч на другой частоте. Таким образом, при полете в цель снаряд летит сначала по программе до входа в широкий луч. С этого момента включается система грубого наведения на снаряде. Снаряд приближается к оси наведения и попадает в узкий луч. Здесь управление переключается на систему точного наведения, и снаряд все ближе придерживается этой оси. Разумеется, самолет, с которого был выпущен снаряд, должен маневрировать таким образом, чтобы антенна радиолокатора была направлена в сторону цели. Иначе радиолокатор не в состоянии автоматически сопровождать цель.
Командный метод наведения, по мнению зарубежных специалистов, имеет существенный недостаток. Дело в том, что при наведении используются различные линии связи между станцией наведения и снарядом. А эти линии могут быть подвергнуты воздействию помех, созданных противником. Кроме того, такое наведение ограничено дальностью устойчивой связи и радиолокационной видимости. По мере увеличения дальности точность наведения уменьшается.
Если станцию наведения разместить на самом снаряде, то, естественно, по мере его сближения с целью точность наведения будет все время увеличиваться.
Метод, при котором команды наведения вырабатываются непосредственно на борту снаряда, называется методом самонаведения. Этот метод поэтому несколько похож на метод автономного наведения. Однако если при автономном наведении снаряд не получает никакой информации извне, то при самонаведении используется информация, приходящая от цели.
Снаряд с системой самонаведения способен исправить ошибку, допущенную при его пуске или возникшую в результате возмущающего действия внешней среды, Он способен даже преследовать маневрирующую цель, Это достигается тем, что на снаряде устанавливается координатор цели. Этот прибор предназначен для определения направления на цель, если она чем-либо выделяется на окружающем фоне.
Цель может выделяться на окружающем фоне своим теплом, светом, звуком, свойством интенсивного отражения или излучения радиоволн. В зависимости от контрастности цели самонаведение может быть инфракрасным, радиолокационным, оптическим или акустическим.
Инфракрасное самонаведение обеспечивается таким координатором, который реагирует на тепловые лучи, исходящие от цели. Например, горячие газы, выходящие из сопла реактивного двигателя самолета, обеспечивают необходимый тепловой контраст для наведения снаряда на самолет.
Радиолокационное самонаведение обеспечивается тем, что координатор воспринимает радиоволны, излучаемые или отражаемые от цели, и определяет направление, откуда они идут. Например, работающие радиостанция или радиолокатор излучают радиоволны, а металлические поверхности (корпуса кораблей, самолетов) хорошо отражают такие волны, излучаемые наземными станциями, станцией на самолете-носителе, выпустившем снаряд, или станцией на самом снаряде.
Оптическое и акустическое самонаведение обеспечивается такими координаторами, которые реагируют на световые лучи, исходящие от цели, или улавливают издаваемый ею звук. Например, координатор может "видеть" освещенный город, темный самолет на фоне светлого неба или "слышать" шум работающего двигателя корабля, самолета, танка.
Если с помощью координатора все время определяется направление на цель, то бортовая аппаратура вырабатывает и подает такие команды на рули, чтобы снаряд приближался к цели.
Самонаведение принято подразделять на пассивное, полуактивное и активное.
Пассивным оно называется в том случае, если при наведении снаряда используется энергия, излучаемая целью, например тепловая энергия самолетных двигателей. На самом снаряде только воспринимается эта энергия и определяется направление на ее источник (рис. 33,а).
Наведение называется полуактивным, если используется энергия, отраженная от цели (например, радиоволны), но первичный источник этой энергии расположен где-то вне системы снаряд-цель. Источником ее может быть, например, наземный радиолокатор (рис. 33,б).
В том случае, когда источник отражаемой целью энергии находится на снаряде, наведение называется активным (рис. 33,б).
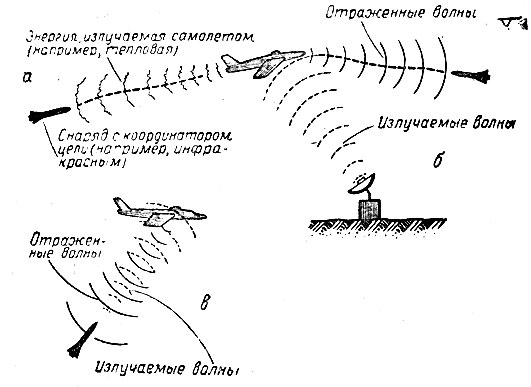
Рис. 33. Самонаведение: а - пассивное; б - полуактивное; в - активное
За рубежом наиболее распространено пассивное инфракрасное самонаведение, не требующее сложного оборудования и затрудняющее создание противником помех. Чувствительность координатора цели может быть при этом очень высокой. В иностранной печати сообщается, что снаряд воздушного боя "Сайдуиндер" имеет координатор, реагирующий на тлеющую папиросу на расстоянии 100 м.
Поскольку каждый из указанных методов имеет свои преимущества и недостатки, на ряде иностранных управляемых снарядов и ракет применяется метод комбинированного наведения. Например, для зенитной ракеты "Бомарк" применяется в начале ее полета теленаведение, а в конце - активное самонаведение. Для зенитных ракет "Тартар" и "Талос" применяют вначале теленаведение по лучу и полуактивное самонаведение в конце их полета.
К числу комбинированных систем принадлежит также система наведения баллистической ракеты "Атлас". Скорость этой ракеты измеряется посредством наземного радиолокатора, работающего на принципе Допплера. Передающая станция непрерывно облучает ракету, а другие четыре станции, расположенные крестообразно вокруг передающей, принимают отраженный ею сигнал. Согласно принципу Допплера, частота радиоволн, отраженных движущимся объектом, зависит от скорости его движения. Замерив разность между частотой посылаемого и частотой принятого сигнала, можно вычислить скорость, с которой ракета удаляется от радиолокатора. Азимут и наклонную дальность до ракеты определяют посредством другого наземного радиолокатора - радиолокатора сопровождения.
Установленный на пункте управления вычислитель, получающий данные от обоих радиолокаторов, непрерывно определяет действительную траекторию движения ракеты, сравнивает ее с расчетной, рассчитывает поправки и определяет моменты выключения двигателей. Этот вычислитель имеет около 20 тысяч полупроводниковых элементов и несколько сот тысяч паяных соединений. Команды на ракету подаются по радио.
В целом эта часть системы является командной системой телеуправления. Однако на начальном участке траектории, когда помехи от земли мешают работе радиолокаторов, эта система применяться не может. Поэтому на борту ракеты имеется также автономная система - своего рода автопилот, управляющий ракетой на первом этапе ее полета.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'