3.2. Скрытность действий
Скрытность действий подводных лодок является их важнейшим тактическим свойством, принципиально отличающим от других родов сил флота и позволяющим незаметно для противника проникать в подводном положении в контролируемые им районы, длительно там находиться и наносить внезапные удары из-под воды.
Скрытность обеспечивается: способностью подводных лодок плавать на больших глубинах, длительно находиться (особенно атомных подводных лодок) в подводном положении, не всплывая даже на перископную глубину; слабым проявлением по сравнению с надводными кораблями демаскирующих признаков; правильным использованием гидроакустических условий моря в районе плавания и выбором малошумных скоростей хода; преимущественным использованием средств наблюдения за обстановкой в пассивных режимах; применением различных средств маскировки; выполнением различных организационных и технических мероприятий по соблюдению скрытности и выполнением специальных маневров по уклонению от обнаружения противником.
К основным демаскирующим признакам подводной лодки относятся ее физические поля, то есть физические свойства, присущие подводной лодке как материальному объекту или возникающие в результате ее взаимодействия с окружающей средой [13]. На практике физическими полями подводной лодки принято называть области пространства вокруг нее, близкие к сфере или полусфере в зависимости от глубины погружения, в которых проявляются и могут быть зарегистрированы приборами соответствующие характеристики физических полей (на фоне полей естественных), используемые для поиска и обнаружения подводных лодок, наведения на них оружия, срабатывания неконтактных взрывателей средств поражения.
К основным физическим полям подводной лодки относятся: первичное и вторичное гидроакустическое, магнитное, первичное и вторичное электромагнитное, электрическое, тепловое, гидродинамическое, гравитационное, радиационное и оптическое.
Кроме того, к демаскирующим признакам подводной лодки относятся: ее кильватерный след, образующийся в результате возмущения водных масс вращающимися гребными винтами, а также движущимся корпусом; след выхлопных газов дизелей при движении дизельной подводной лодки под РДП; след на поверхности моря, образующийся в результате нарушения герметичности топливных цистерн и гидравлических приводов; удаляемые за борт отходы жизнедеятельности экипажа; демаскирующие признаки, образующиеся в результате применения оружия, особенно ракетного, и другие.
Используя все эти демаскирующие признаки подводных лодок, противолодочные силы могут вести их поиск с использованием акустических и неакустических средств (магнитометров, радиолокационных станций обнаружения надводных целей, инфракрасной аппаратуры обнаружения кильватерного следа, газоанализаторов, средств радио- и радиотехнической разведки и др.).
Основными источниками первичного гидроакустического поля подводной лодки (подводного шума) являются гребные винты, работающие главные и вспомогательные механизмы, оборудование и системы, а также движущийся корпус подводной лодки вследствие обтекания его забортной водой. Кроме того, источниками первичного гидроакустического поля могут быть гидроакустические станции (комплексы), работающие в активных режимах (измерения дистанции до цели, звукоподводной связи, миноискания), работающие эхолоты и эхоледомеры.
Отраженные от корпуса подводной лодки гидроакустические волны, излученные другими источниками (гидролокаторами, радиогидроакустическими буями, взрывными источниками звука и т. п.), создают вторичное гидроакустическое поле.
Гидроакустическое поле является одним из основных демаскирующих подводную лодку факторов. При этом основным и самым мощным источником подводного шума являются гребные винты. Шум от винтов возрастает с увеличением скорости подводной лодки (частоты вращения винтов) и при некотором критическом значении скорости становится максимальным. Под критической скоростью понимают такое ее значение, при котором возникает кавитация гребных винтов, сопровождающаяся мощным шумом в широкой полосе частот. Кавитация гребного винта - это образование на лопастях быстровращающегося винта в водной среде разреженных полостей, которые увеличивают шумность подводной лодки [13]. Снижение кавитационного шума достигается путем подбора форм лопастей, частоты вращения винта, а также увеличением числа лопастей, так как при этом давление на них распределяется более равномерно, благодаря чему навигация возникает при больших скоростях хода. У винтов с поврежденными лопастями возникает "пение", вызываемое вибрацией лопастей под действием набегающего потока. Во избежание этого во время предпоходовой подготовки подводной лодки, а также во время планового докования производятся осмотр гребных винтов и устранение повреждений лопастей.
Основными источниками шума работающих механизмов на атомных подводных лодках являются парогенераторы, главный турбозубчатый агрегат, циркуляционные насосы, холодильные машины и другие механизмы.
Борьба с этими шумами ведется по трем направлениям [43]:
- снижение шума в источнике, то есть создание малошумных механизмов;
- ослабление излучаемой звуковой энергии путем применения средств вибро- и звукоизоляции, вибро- и звукопогашения (различные покрытия, амортизирующие и демпфирующие устройства);
- поддержание механизмов, вибро- и звукоизолирующей арматуры и покрытий в исправном состоянии в период эксплуатации, а также постоянный контроль за уровнем шумности подводной лодки.
Например, на атомных ракетных подводных лодках ВМС США во время испытаний регистрируются шумность и виброактивность более чем у 150 механизмов.
Перед каждым походом на боевое патрулирование замеряют шумность подводной лодки, и если ее уровень превышает допустимый, то выход в море запрещается до выявления и устранения причин.
Гидродинамический шум, возникающий вследствие обтекания корпуса подводной лодки забортной водой, становится определяющим при движении на больших докавитационных скоростях. Для его уменьшения совершенствуют гидродинамические и пропульсивные качества корпусов подводных лодок, применяют одновальные силовые установки, придают корпусу форму тела вращения оптимальной полноты с небольшим отношением длины к диаметру, уменьшают площади вырезов в наружной обшивке и закрывают их щитами, сокращают количество выступающих забортных конструкций, применяют специльные покрытия корпуса.
Для снижения вторичного гидроакустического поля применяют противогидролокационные покрытия [13, 48]. В целях снижения гидроакустической заметности подводной лодки осуществляется гидроакустическое подавление, основными задачами которого являются защита подводной лодки от обнаружения гидроакустическими средствами наблюдения противника и поражения ее боевыми средствами, имеющими гидроакустические системы наведения, а также введение противника в заблуждение или нарушение работы его систем гидроакустического наблюдения. К мероприятиям гидроакустического подавления, направленным на нарушение гидроакустического контакта, установленного противником с подводной лодкой, относится применение дрейфующих и самоходных имитаторов, выпускаемых с подводной лодки и воспроизводящих ее гидроакустическое поле как первичное, так и вторичное, а также имитационных патронов, создающих облако пузырьков газа, отражаясь от которого ультразвуковые волны, излучаемые активными гидроакустическими средствами наблюдения, создают эхо как от подводной лодки.
Для снижения вероятности обнаружения подводной лодки гидроакустическими средствами противника по излучениям ее активных гидроакустических средств их использование допускается только в особых случаях в зависимости от тактической обстановки, когда без этого невозможно успешное решение поставленной задачи, кратковременно и только с разрешения командира подводной лодки.
Скрытность подводной лодки от гидроакустических средств наблюдения противника в значительной степени зависит от правильного учета и использования гидрологических условий в районе плавания [1, 13, 48]. Гидрологические условия определяются характером распределения по глубине скорости распространения звука в морской воде, которое соответствует сезонным и суточным изменениям температуры и солености воды. Важнейшим следствием изменения скорости звука является рефракция звуковых лучей, то есть искривление лучей, которое существенно влияет на дальность действия гидроакустических средств обнаружения. Различают следующие типовые случаи вертикального распределения скорости звука (рис. 3.1):
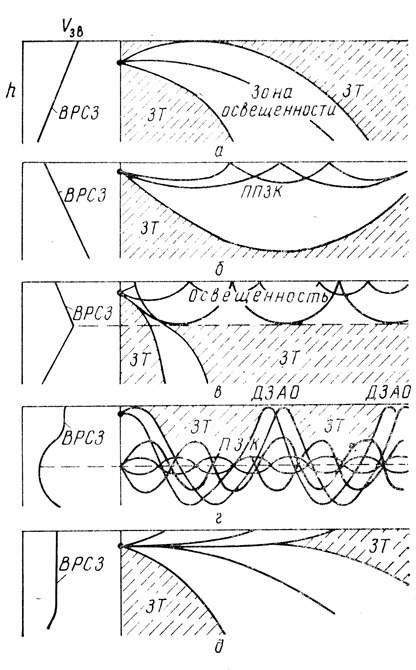
Рис. 3.1. Основные типы вертикального распределения скорости звука в воде: а - отрицательная рефракция; б - положительная рефракция; в - слой скачка скорости звука; г - подводный звуковой канал; д - изотермия
1) скорость звука уменьшается с глубиной, то есть отрицательная рефракция (рис. 3.1, а);
2) скорость звука возрастает с глубиной, то есть положительная рефракция (рис. 3.1, б);
3) скорость звука сначала увеличивается с глубиной, а затем уменьшается, то есть резкий ее перепад при небольшом изменении глубины (слой скачка) (рис. 3.1, в);
4) скорость звука сначала уменьшается с глубиной, а затем увеличивается (подводный звуковой канал) (рис. 3.1, г);
5) скорость звука практически не изменяется с глубиной (так называемая изотермия) (рис. 3.1, д).
В результате рефракции на различных удалениях от источника звука образуются зоны акустической освещенности и зоны тени (ЗТ), которые облегчают или затрудняют обнаружение подводных объектов с помощью гидроакустических средств. Зоной акустической освещенности является область водной среды, в которой возможен прием акустических сигналов, создаваемых источником звуковых колебаний или отраженных от наблюдаемого объекта. В зонах тени, которые образуются, как правило, при отрицательной рефракции, объект не обнаруживается или условия обнаружения гидроакустическими средствами ухудшаются, что происходит в результате искривления звуковых лучей книзу.
В случае изотермии акустические лучи на небольших расстояниях в приповерхностном слое распространяются прямолинейно, но с увеличением глубины образуются зоны тени, которые затрудняют гидроакустический поиск.
При положительной рефракции распространение акустических лучей сопровождается их многократными отражениями от поверхности моря, которые происходят практически без потерь звуковой энергии. В результате звук распространяется значительно дальше, чем в предыдущих случаях, и условия гидроакустического поиска более благоприятны, так как при этом образуется так называемый приповерхностный звуковой канал (ППЗК), который может быть сезонным, образующимся в теплую половину года, с глубиной залегания его оси от 30 до 200 м.
Подводный звуковой канал (ПЗК) образуется в результате влияния положительной и отрицательной рефракций и полного внутреннего отражения, в результате чего в определенном слое воды в море создаются условия для сверхдальнего распространения звука (до нескольких тысяч миль). В отличие от поверхностного (сезонного) звукового канала он носит стационарный характер с глубиной залегания оси канала от 500 м в приполярных районах до 1500 м в тропической зоне [13]. При гидроакустическом поиске наибольшие дальности действия гидроакустических средств обеспечиваются в тех случаях, когда источник и приемник звука расположены вблизи оси канала.
Слой скачка скорости звука - это слой в толще морской воды, в котором ее плотность, зависящая от температуры и солености, резко отличается от аналогичных характеристик в выше- и нижележащих слоях. В этом слое резко изменяется скорость звука (небольшая положительная рефракция меняется на резко отрицательную) и происходит значительное преломление акустических волн, их интенсивность на выходе из такого слоя ослабевает. Слой скачка обладает экранирующими свойствами и снижает эффективность наблюдения гидроакустическими средствами, особенно при нахождении объекта поиска и средства, ведущего поиск, по разные стороны горизонта слоя скачка, что учитывается в тактике подводных лодок и противолодочных сил. При наличии слоя скачка подводная лодка занимает глубину погружения выше или ниже этого слоя в зависимости от обстановки и решаемой задачи.
Например, при прорыве противолодочного рубежа или противолодочного охранения подводная лодка для сохранения скрытности обычно уходит под слой скачка. Однако следует учитывать, что при этом ухудшаются условия для собственного гидроакустического наблюдения. И, наоборот, при поиске и атаке надводного противника подводная лодка, как правило, маневрирует выше слоя скачка, что улучшает ей условия гидроакустического наблюдения, но в то же время снижается собственная скрытность.
Противолодочные силы (надводные корабли, вертолеты) при наличии слоя скачка вынуждены производить поиск подводных лодок гидролокаторами с опускаемыми под слой скачка акустическими системами. Противолодочные самолеты в этом случае используют радиогидроакустические буи, имеющие заглубление гидрофона, превышающее глубину залегания горизонта слоя скачка, а подводные лодки при поиске подводных лодок периодически маневрируют по глубине. Толщина слоя скачка находится в пределах от нескольких метров до десятков метров. Кроме того, в ряде случаев при определенных глубинах океана в результате влияния положительной и отрицательной рефракции, полного внутреннего и многократного отражения звуковых лучей от поверхности и дна океана образуются дальние зоны акустической освещенности (ДЗАО). Их может быть несколько, при этом они чередуются с зонами тени. Обнаружение в дальних зонах акустической освещенности из-за ослабления звуковых лучей в результате их поглощения и рассеяния возможно только сильно шумящих объектов, как правило, крупных надводных кораблей или их групп.
При обеспечении скрытности подводной лодки от гидроакустических средств наблюдения, а также при организации гидроакустического поиска следует учитывать влияние на условия и дальность распространения звуковых волн собственных шумов моря, которые возникают от звуков, производимых морскими животными (рыбами, дельфинами и др.), а также от ударов волн, морского прибоя, сильных ливней и т. д.
На дальность действия активных гидроакустических средств противолодочных сил оказывает влияние реверберация, которая представляет собой послезвучание, наблюдающееся в точке расположения гидролокатора после прекращения звукового импульса. Реверберация в море возникает в результате рассеяния звука, вызываемого различными неоднородностями морской среды, а также неровностями дна и волнистой поверхности моря. Она ограничивает дальности действия гидролокационных станций и уменьшает возможности обнаружения объектов.
При расчетах для обеспечения скрытности подводной лодки от гидроакустических средств обнаружения противолодочных сил противника следует учитывать также, что в зарубежной печати данные о дальности их действия приводятся для однородной среды, благоприятных гидрологических условий и, как правило, завышены в рекламных целях, однако и недооценивать сведения о них не следует.
Зная законы распространения звуковой энергии в морской воде и конкретные гидрологические условия в районе плавания, можно выбрать глубину погружения подводной лодки, обеспечивающую максимальную скрытность от гидроакустических средств обнаружения. И, наоборот, ведя поиск надводных кораблей или подводных лодок противника, можно выбрать глубину, обеспечивающую максимальные дальности обнаружения объектов поиска гидроакустическими станциями (комплексами).
Основными источниками магнитного поля подводной лодки являются ферромагнитные материалы корпуса, механизмов, оборудования, вооружения, корабельные энергетические системы постоянного тока. Для снижения магнитного поля как демаскирующего фактора, а также для уменьшения вероятности подрыва подводной лодки на неконтактных магнитных минах устанавливаются специальные размагничивающие устройства.
Электромагнитное поле может быть первичным, создаваемым самой подводной лодкой, и вторичным, образующимся в результате отражения электромагнитных волн от корпуса и выдвижных устройств подводной лодки при облучении их радиолокационными станциями. Источником первичного электромагнитного поля являются функционирующие механизмы и различные радиоэлектронные средства подводной лодки, главным образом радиолокационные станции, работающие в активном режиме, а также средства радиосвязи. Излучения этих средств могут быть обнаружены, классифицированы, перехвачены и запеленгованы средствами радио- и радиотехнической разведки противника, в том числе установленными на противолодочных кораблях и самолетах (вертолетах).
Для снижения вероятности обнаружения подводной лодки ее радиолокационные станции в активном режиме используются ограниченно и только в тех случаях, когда без этого невозможно успешное выполнение поставленной задачи; ограничивается количество передаваемых радиограмм с подводных лодок, применяется аппаратура сверхбыстродействия, засекреченной связи и др.
Для снижения вероятности обнаружения по отраженному электромагнитному полю ограничивается время пребывания подводной лодки в надводном положении и на перископной глубине, что особенно характерно для атомных подводных лодок. Выдвижные устройства подводных лодок (перископы, РДП, радио- и радиолокационные антенны и т. д.) покрываются специальными противорадиолокационными покрытиями, снижающими радиолокационную заметность выдвижных устройств. Для осуществления связи без всплытия на перископную глубину применяются специальные рамочные и другие антенны и длинноволновые приемники, позволяющие подводным лодкам вести радиоприем на глубинах погружения до 25 м и более. Для связи с самолетами и надводными кораблями применяются всплывающие буйковые антенны, использующиеся в подводном положении на ходу и на стопе [57]. Для связи с самолетами, кроме того, используются радиогидроакустические буи, принимающие радиограммы самолета и передающие их на подводную лодку по каналу звукоподводной связи и, наоборот, принимающие по этому каналу информацию от подводных лодок и передающие ее по радиоканалу на самолет. Для радиопередач на подводные лодки, находящиеся в погруженном состоянии на глубинах до 30 м, созданы наземные сверхдлинноволновые радиопередатчики большой мощности.
Тепловое поле подводной лодки - это создаваемое ею электромагнитное излучение в инфракрасном диапазоне волн. Источником теплового поля являются корпус подводной лодки при нахождении ее в надводном положении, выдвижные устройства, особенно устройство РДП, при нахождении ее на перископной глубине и кильватерный след. Тепловое излучение подводной лодки создает определенную контрастность на фоне моря, что используется в системах обнаружения подводных лодок. Дальность действия этих систем при дожде, тумане, волнении моря, а также при увеличении глубины погружения подводной лодки уменьшается.
Электрическое поле подводной лодки представляет собой разность потенциалов между металлическим корпусом ее (в том числе сочетанием различных металлов, из которых изготавливаются различные устройства и системы) и морской водой. Проявляется слабо и мало используется в средствах обнаружения и неконтактных взрывателях средств поражения.
Гидродинамическое поле подводной лодки - это область водной среды, в которой изменяются скорости частиц воды, вызванные движением подводной лодки, и связанное с этим давление в окружающей среде. Чувствительные элементы неконтактных взрывателей некоторых неконтактных донных мин реагируют на изменение параметров гидродинамического поля.
Радиационное поле образуется у атомных подводных лодок в результате работы главной энергетической установки. Как правило, при исправной биологической защите реактора и систем, обеспечивающих его работу, оно незначительно и мало влияет на скрытность подводной лодки.
Оптическое поле проявляется в зрительной заметности подводной лодки в надводном положении, на перископной глубине и под водой на глубинах более перископной. Зрительная заметность зависит от освещенности, состояния атмосферы, осадков, волнения моря, а также от прозрачности морской воды. Для ее снижения корпус подводной лодки окрашивается под цвет морской воды, выдвижные устройства поднимаются на минимальную необходимую высоту, при плавании на перископной глубине во избежание образования буруна используются малые скорости хода. При плавании под водой глубина погружения должна превышать прозрачность воды в метрах для исключения обнаружения с воздуха.
Гравитационное поле подводной лодки представляет собой проявление гравитационных сил, вызванных присутствием подводной лодки в данном месте как материального объекта. Оно проявляется слабо и на скрытность подводной лодки не влияет.
Таким образом, зная физические поля подводной лодки и другие ее демаскирующие признаки, их допустимые уровни, мероприятия по их снижению, правильно учитывая гидрологические и гидрометеорологические условия в районе плавания для выбора необходимой глубины погружения и скорости хода, можно обеспечить высокую скрытность подводной лодки.
В годы войны советские подводники уделяли большое внимание выбору глубины погружения [62]: "Одни считают, что выбирать глубины <...> следует исходя из напряжения, испытываемого прочным корпусом лодки. Чем больше давление воды <...> тем опаснее взрыв каждой бомбы <...> чем меньше глубина погружения, тем больше возможностей для борьбы с поступающей в лодку водой <...> находясь на небольшой глубине, можно быстрее всплыть под перископ и <...> контратаковать противника. С других позиций подходят противники малых глубин <...> Чтобы потопить или серьезно повредить подводную лодку, нужно довольно точное попадание. Точность же бомбометания с увеличением глубины понижается <...> Разделяю вторую точку зрения <...> увеличение глубины погружения, как правило, затрудняет работу гидроакустиков противолодочных кораблей, способствует нашей маскировке <...> Чем больше глубина, тем больше слоев воды с различными температурами и плотностями, тем больше трудностей <...> в гидроакустическом поиске противника". Так писал Г. И. Щедрин.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'