3.4. Преодоление противолодочных зон и рубежей
Подводные лодки в ходе решения поставленных задач вынуждены сталкиваться с необходимостью преодоления противодействия противолодочных сил и средств как в военное, так и в мирное время на всех этапах выполнения задачи: на переходе морем в район боевых действий или район боевого патрулирования, в ходе непосредственного выполнения поставленной задачи в назначенном районе, а также при возвращении в пункт базирования. Основной задачей при преодолении противодействия противолодочных сил при ведении боевых действий является недопущение обнаружения подводной лодки противолодочными силами, а также поражения ее противолодочным оружием, а в мирное время - недопущение обнаружения подводной лодки и установления длительного слежения за ней противолодочными силами противника.
Успешное преодоление подводной лодкой противодействия противолодочных сил и средств обеспечивается прежде всего строгим соблюдением скрытности действий, а при нарушении ее - своевременным решительным маневром по курсу, глубине погружения и скорости хода в сочетании с применением оружия по противнику и средств гидроакустического подавления. Успешность преодоления противодействия противолодочных сил и средств противника обеспечивается также знанием боевых возможностей этих сил и тактики их действий против подводных лодок, знанием боевых возможностей своей подводной лодки, тактических приемов уклонения и отрыва от противолодочных сил, содержанием оружия, средств гидроакустического подавления и других технических средств в постоянной готовности к применению, высокой боевой выучкой и высокими морально-боевыми качествами экипажа подводной лодки.
Скрытность действий подводной лодки обеспечивается низкими уровнями ее физических полей, правильным учетом гидроакустических и гидрометеорологических условий в районе плавания и выбором оптимальных глубин погружения, использованием малошумных скоростей хода, а радиоэлектронных средств (РЭС) только в пассивных режимах, мероприятиями по уменьшению вероятности встречи с противолодочными силами - обходом выявленных или предполагаемых районов их действий, выходом из полосы обследования (поиска) противолодочных сил, а при невозможности этого - скрытным форсированием районов их действий.
Подводные лодки могут преодолевать противодействие противолодочных сил и средств противника самостоятельно и при обеспечении другими силами флота (специально выделенными многоцелевыми подводными лодками, противолодочными кораблями и авиацией, тральщиками и др.).
В целях обеспечения безопасности подводной лодки от противолодочных сил и средств на переходе морем и в районе боевых действий организуются все виды обороны и защиты (ПВО, ПЛО, ПМО, защита от оружия массового поражения, противоторпедная защита).
Самостоятельная ПВО подводных лодок в связи с отсутствием на них зенитных средств является пассивной и основана на своевременном уклонении от обнаружения авиацией и от поражения ее оружием. При обеспечении другими силами она организуется в системе ПВО сил флота на переходе морем и осуществляется зенитными средствами военно-морских баз и истребительной авиацией флота во взаимодействии со средствами ПВО береговых частей в пределах их досягаемости.
Содержанием ПВО в этом случае являются обнаружение и опознавание воздушных целей, оповещение подводных лодок о воздушной опасности, перехват и уничтожение самолетов, вертолетов, крылатых ракет и других средств воздушного нападения [48].
При самостоятельном преодолении подводной лодкой противодействия противолодочных самолетов и вертолетов наиболее важным является своевременное их обнаружение. С этой целью при нахождении подводной лодки на перископной глубине ведется непрерывное и тщательное наблюдение за воздушной обстановкой с помощью зрительных и технических средств (станций обнаружения радиолокационных сигналов).
Имея значительное (в несколько раз) упреждение в дальности обнаружения противолодочного самолета (вертолета) по работе его радиолокационной станции в режиме непрерывного излучения, подводная лодка всегда имеет возможность уклониться от обнаружения РЛС погружением на глубину более перископной, что применялось подводными лодками ВМС фашистской Германии еще в годы второй мировой войны. При ведении противолодочной авиацией дискретного поиска, то есть с периодическим включением РЛС на излучение, всегда имеется определенная вероятность обнаружения подводной лодки, которая зависит от времени пребывания на перископной глубине, цикла поиска (то есть периодичности включения РЛС) и других величин. Отсюда следует, что, находясь в зоне, опасной от противолодочной авиации, подводная лодка должна как можно реже всплывать на перископную глубину, а пребывание на ней должно быть кратковременным. Современные атомные подводные лодки, имея высокоточные навигационные комплексы, высокопроизводительные системы регенерации воздуха, практически неограниченные энергоресурсы, всплывающие радиоантенны и другие технические средства, способны длительное время не всплывать на перископную глубину, если это не требуется для решения поставленной задачи.
Обнаружив работу самолетной РЛС (после классификации ее по соответствующим техническим параметрам), подводная лодка Должна немедленно погрузиться. Огромное значение немедленному погружению при обнаружении любого самолета придавали командиры советских подводных лодок в годы Великой Отечественной войны. Герой Советского Союза вице-адмирал Г. И. Щедрин, по этому поводу пишет [62]: "От сигнальщиков и вахтенных офицеров требуется умение быстро опознавать самолеты. Радиолокации на нашем корабле нет. А нам предстоит действовать в одном районе со своими самолетами. Раньше достаточно было короткого доклада: "Самолет" - и лодка немедленно погружалась. Мы предпочитали десять раз уйти под воду от своего самолета, чем один раз не погрузиться от самолета противника".
При погружении подводной лодки даже в том случае, если противолодочный самолет (вертолет) ведет дискретный радиолокационный поиск, контакт сразу прерывается, и он вынужден вести вторичный поиск с использованием радиогидроакустических буев, магнитометра или аппаратуры обнаружения кильватерного следа. Учитывая комплексное использование противником средств обнаружения, подводные лодки при уклонении от противолодочной авиации погружаются на большие глубины, что снижает проявление их физических полей и расширяет диапазон докавитационных скоростей для выполнения маневра уклонения, который должен быть направлен на быстрейший выход подводной лодки из зоны возможного обнаружения. При этом важное значение имеет знание технических возможностей средств поиска противолодочной авиации и тактических приемов их использования. При нахождении подводной лодки на глубинах более перископной и использовании противолодочной авиацией пассивных средств наблюдения подводная лодка не может установить факта ведения поиска ее в данном районе, а иногда и скрытного слежения за ней. Отсюда вытекает необходимость постоянно иметь высокую готовность к уклонению от противолодочного оружия и применению средств гидроакустического подавления. В тех случаях, когда противолодочная авиация ведет поиск с использованием активных гидроакустических средств (активных РГАБ или опускаемых гидролокаторов вертолетов), подводная лодка также, как правило, имея упреждение в дальности обнаружения работы этих средств по сравнению с их дальностями обнаружения подводной лодки, способна, осуществив маневр по курсу, скорости хода и глубине погружения, обойти опасный район или выйти из полосы обследования.
Исключение составляют те случаи, когда серия активных радиогидроакустических буев выставлена непосредственно вблизи места нахождения подводной лодки и она оказывается в зоне их действия, а также те случаи, когда противолодочный вертолет производит зависание и опускание своего гидролокатора в районе местонахождения подводной лодки. В этих случаях подводная лодка применяет средства гидроакустического подавления (имитационные патроны; дрейфующие и самоходные приборы помех и имитаторы) и осуществляет маневр отрыва, изменяя курс, увеличивая скорость и занимая глубину наибольшей скрытности от гидроакустических средств в зависимости от гидроакустических условий в районе плавания.
При заблаговременном обнаружении противолодочного вертолета, ведущего поиск подводных лодок с помощью опускаемого гидролокатора, подводная лодка, может осуществить выход из его полосы поиска. Расчет маневра может быть произведен по известным правилам тактического маневрирования для расхождения с быстроходным объектом на заданном расстоянии. Для этого до начала маневра необходимо понаблюдать несколько зависаний вертолета, определить его цикл поиска, а по циклу - среднюю скорость поиска. Зная среднюю скорость и пеленги на точки зависания, известным штурманским способом можно приближенно определить курс вертолета. Все расчеты производятся с учетом классификации гидролокатора по его техническим параметрам (рабочей частоте, периоду следования посылок и т. д.) и классификации носителя, а также с учетом ожидаемой дальности действия гидролокатора (рис. 3.4).
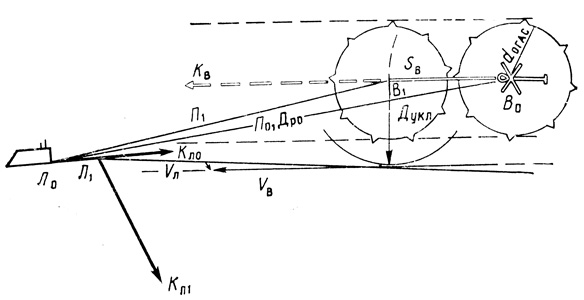
Рис. 3.4. Уклонение подводной лодки от обнаружения противолодочным вертолетом с опускаемой ГАС: В0 и В1 - точки зависания вертолета; dОГАС - дальность действия опускаемой ГАС вертолета; Sв - путь вертолета между точками зависания; Кв и Vв - ориентировочные курс и скорость вертолета; Л0 и Л1 - места подводной лодки при зависаниях вертолета; П0 и П1 - пеленги на вертолет при его зависаниях; Дро - расчетная дальность обнаружения работы ОГАС вертолета подводной лодкой; Дукл - избранная дистанция уклонения от вертолета (Дукл > dОГАС); Кл0 и Кл1 - курсы подводной лодки (исходный и при уклонении соответственно); Vл - скорость подводной лодки при уклонении от вертолета
В ходе преодоления подводными лодками противодействия противолодочной авиации противника кроме ее боевых возможностей и тактики действий против подводных лодок следует также учитывать влияние на эффективность использования противолодочной авиации гидрометеорологических условий района. Ведение поиска с использованием всех средств обнаружения, за исключением магнитных обнаружителей, затруднено при сильных ветре, волнении и осадках. Неблагоприятные гидрометеорологические условия затрудняют или исключают взлет и посадку палубных противолодочных самолетов и вертолетов. Затруднены или полностью исключены также действия противолодочной авиации против подводных лодок в районах, покрытых льдами.
Успешное преодоление подводной лодкой противодействия противолодочной авиации обеспечивается не только высокими боевыми возможностями подводной лодки и выучкой ее экипажа, но также в большой степени уровнем тактической подготовки командира подводной лодки и вахтенных офицеров. Особенно велика роль вахтенного офицера при непосредственном уклонении от обнаружения и атак противолодочной авиацией, большое значение имеют при этом его тактическая подготовка и умение, учитывая большие скорости самолетов и вертолетов, быстро принимать правильные решения на первоначальные действия при визуальном обнаружении противолодочных самолетов или вертолетов, работы их активных средств обнаружения, а также их противолодочного оружия.
При обнаружении самолета (вертолета) в перископ или с помощью станции обнаружения радиолокационных сигналов вахтенный офицер, начиная маневр уклонения, немедленно опускает выдвижные устройства, объявляет боевую тревогу, докладывает командиру подводной лодки и начинает погружение на глубину, а при нахождении подводной лодки в надводном положении или под устройством РДП производит срочное погружение. Кроме того, он приводит средства гидроакустического подавления в готовность к немедленному использованию. В процессе погружения до прибытия на ГКП командира подводной лодки вахтенный офицер использует только малошумные докавитационные скорости в соответствии с достигнутой глубиной погружения, усиливает гидроакустическое наблюдение за водной средой, следит за глубиной погружения и удифферентованностью подводной лодки, не допускает опасных дифферентов и контролирует глубину места под килем (по карте) во избежание опасного приближения подводной лодки к грунту в мелководных районах моря.
Многоцелевые подводные лодки противника, особенно атомные с гидроакустическими комплексами и противолодочным управляемым ракетным оружием, наряду с авиацией представляют большую опасность для подводных лодок. По мнению зарубежных военно-морских специалистов, на основании всех имеющихся сегодня данных истинным противником подводных лодок будет сама атомная подводная лодка, а в составе противолодочного соединения она может оказаться еще более эффективной в обнаружении и уничтожении наступающей ударной подводной лодки. Учитывая примерное равенство боевых возможностей подводных лодок, главным образом в дальности действия гидроакустических средств наблюдения и дальности стрельбы противолодочным оружием, преодоление подводной лодкой противодействия противолодочных подводных лодок противника представляет наибольшую сложность.
Находясь в предполагаемых районах действия подводных лодок противника, подводная лодка должна соблюдать максимальную скрытность, правильно выбирая глубину погружения в соответствии с гидроакустическими условиями и используя малошумные скорости хода. Она также должна стремиться к упреждению противника в обнаружении, что в зависимости от поставленной боевой задачи позволит ей или упредить противника в применении противолодочного оружия с последующим уклонением от него или уклоняться от обнаружения противником без применения оружия. Оружие по подводной лодке противника должно применяться с наибольшей эффективностью в расчете поразить ее первым залпом. Для снижения эффективности контратаки противника подводные лодки применяют средства гидроакустического подавления и выполняют маневр по курсу, скорости и глубине погружения. Уклонение от обнаружения подводной лодкой противника при своевременном ее обнаружении осуществляется по правилам тактического маневрирования для расхождения с целью на максимальном расстоянии, превышающем дальность действия средств наблюдения противника. Производство расчетов для уклонения от обнаружения подводной лодкой противника при наличии у уклоняющейся подводной лодки значительного преимущества в дальности действия средств наблюдения зависит от предполагаемого соотношения скоростей хода. Если есть основания предполагать, что скорость своей подводной лодки превосходит скорость подводной лодки противника (например, своя подводная лодка находится на переходе в район или осуществляет смещение в вероятную полосу движения авианосной группы противника, а подводная лодка противника ведет поиск на малошумных скоростях хода), то расчет уклонения от обнаружения может быть произведен по правилам уклонения от тихоходного противника [49]. Сущность задачи заключается в том, чтобы найти такой курс подводной лодки, при котором как бы противник ни маневрировал, он не мог бы сблизиться с подводной лодкой на расстояние, равное дальности действия его средств наблюдения. Графически маневр уклонения рассчитывается следующим образом, (рис. 3.5). На карту наносится место противника Ко и рассчитывается расстояние S, которое он пройдет от момента его обнаружения до начала маневра для уклонения в зависимости от его предполагаемой скорости. Затем радиусом R, равным S + d (где d - расстояние расхождения с противником, превышающее дальность действия его средств наблюдения), описывают окружность вокруг точки Ко. Из места своей подводной лодки Ло проводят касательную к этой окружности и, построив при точке касания треугольник скоростей, находят курс подводной лодки для расхождения с противником на расстоянии, превышающем дальность действия его средств наблюдения. Учитывая сравнительно небольшие дальности действия гидроакустических средств, расчеты следует производить в кратчайшее время и, как правило, с помощью БИУС. Наиболее целесообразно поворот производить сразу на заранее рассчитанный угол для наиболее характерных значений соотношения скоростей хода и дальностей действия средств наблюдения, а затем уточнить курс уклонения указанным выше способом.
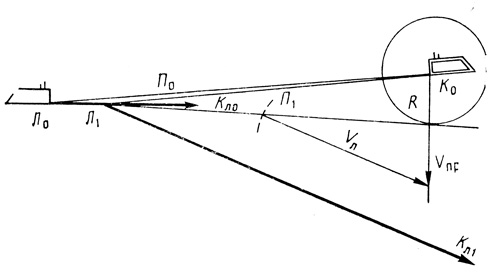
Рис. 3.5. Уклонение подводной лодки от подводной лодки противника при наличии преимущества в скорости хода и дальности обнаружения
Однако следует учитывать, что на практике такая ситуация, когда свои скорость хода и дальность действия средств наблюдения превышают скорость хода и дальность действия средств наблюдения противника, очень редка. Наиболее характерным в этой ситуации случаем может быть обнаружение дизельной подводной лодки противника, находящейся под РДП.
Если скорость своей подводной лодки меньше скорости подводной лодки противника, но имеется преимущество в дальности обнаружения, то расчет маневра производится по правилам уклонения от быстроходного противника на заданном расстоянии [49], рассмотренным ниже для уклонения от противолодочных надводных кораблей. В этом случае особенно важно иметь заранее рассчитанные углы отворота с последующим уточнением курса уклонения графическим построением.
В целях повышения скрытности от подводных лодок противника подводные лодки при наличии преимущества в дальности действия средств обнаружения плавают на глубинах, обеспечивающих им в зависимости от типа гидроакустических условий максимальные дальности обнаружения противника, а при отсутствии упреждения - на глубинах, обеспечивающих минимальные дальности обнаружения подводной лодки противником.
В районах, опасных от подводных лодок противника, подводные лодки используют малошумные скорости, например, скорости американских ПЛАРБ в целях скрытности, как правило, не превышают 5 уз.
Для отрыва от противника при обнаружении им подводной лодки используются большие, вплоть до полной, скорости и применяются средства гидроакустического подавления.
В ряде случаев, особенно при форсировании противолодочных рубежей противника, ударные подводные лодки могут преодолевать противодействие противолодочных подводных лодок в обеспечении других сил флота (многоцелевых подводных лодок, противолодочных кораблей и авиации).
При нахождении подводной лодки в районе действий противолодочных подводных лодок противника для успешного преодоления их противодействия необходимо не только знать боевые возможности этих подводных лодок и тактику их действий, а также знать и правильно учитывать влияние на боевые действия подводных лодок физико-географических факторов. Необходимо учитывать глубину моря, состояние погоды, гидроакустические условия в районе плавания, наличие подводных турбулентных течений и ледового покрова.
Малые глубины моря затрудняют действия атомных подводных лодок, и присутствие их в таких районах маловероятно. Наличие ледового покрова, наоборот, практически исключает действия под ним дизельных подводных лодок, и в таких районах наиболее вероятна встреча с атомными многоцелевыми подводными лодками.
Наличие сильных подводных турбулентных течений затрудняет обнаружение подводных лодок как акустическими, так и неакустическими средствами наблюдения при ведении поиска противолодочными подводными лодками. Вместе с тем это затрудняет наблюдение за подводной обстановкой и подводной лодке, стремящейся избежать встречи с подводной лодкой противника.
Однако важнейшее значение для успешного преодоления районов действия противолодочных подводных лодок имеет правильный учет гидроакустических условий в районе плавания.
Вахтенный офицер подводной лодки при плавании в районах, где возможна встреча с противолодочными подводными лодками, в целях соблюдения скрытности обеспечивает строгое удержание назначенных глубины погружения, курса и режима движения. Активные радиоэлектронные средства, в том числе эхолот для определения глубины под килем и эхоледомер при плавании подо льдами, используются в целях обеспечения навигационной безопасности плавания только с разрешения командира подводной лодки и кратковременно.
Ремонтные и другие работы, связанные с шумом, производятся только в случаях крайней необходимости и после доклада командиру подводной лодки. Вахтенный офицер следит за изменением характера гидроакустических условий и установленной периодичностью докладов вахтенного гидроакустика об обстановке, правильностью использования режимов работы гидроакустического комплекса для своевременного обнаружения подводной лодки противника.
С обнаружением подводной лодки противника вахтенный офицер объявляет боевую тревогу и докладывает об этом командиру подводной лодки, начинает определение элементов движения цели и с установлением стороны изменения пеленга выполняет первоначальные действия по уклонению от обнаружения подводной лодкой, а в военное время - для применения по ней оружия и средств гидроакустического подавления на самооборону.
При установлении факта слежения за подводной лодкой со стороны противолодочной подводной лодки противника вахтенный офицер, кроме того, начинает решительный маневр по отрыву от слежения в соответствии с существующими правилами.
Противодействие противолодочных надводных кораблей подводная лодка может встретить главным образом на переходе морем, особенно на противолодочных рубежах, при атаках отрядов боевых кораблей и конвоев противника, вблизи военно-морских баз и побережья противника [26]. Имея преимущество перед противолодочными кораблями в дальности действия средств обнаружения и возможность заблаговременно обнаружить работу их гидролокаторов, подводная лодка при преодолении противодействия противолодочных кораблей главной задачей должна считать недопущение сближения с ними на дальность действия их гидролокаторов, а затем и противолодочного оружия. При этом необходимо учитывать, что противолодочные корабли поиск подводных лодок будут, как правило, вести с использованием своих палубных противолодочных вертолетов. Имея высокие скорости подводного хода и большие дальности обнаружения противолодочных кораблей, современные атомные подводные лодки всегда могут уклониться от встречи с противолодочными кораблями, обойти район их маневрирования или выйти из полосы обследования корабельной поисково-ударной группы.
Однако во многих случаях (например, при атаке отряда боевых кораблей или конвоя противника) подводная лодка вынуждена идти на сближение с противолодочными кораблями для выполнения поставленной боевой задачи. При этом в ряде случаев для обнаружения и атаки главной цели (например, авианосца из состава АУГ или крупного транспорта из состава конвоя) подводная лодка, кроме того, вынуждена прорывать ближнее корабельное охранение. Линия охранения, как правило, прорывается посредине между двумя ближайшими кораблями. При атаке конвоев во время Великой Отечественной войны подводные лодки осуществляли прорыв охранения с фланга или с головы конвоя. Скрытный прорыв строя противолодочных кораблей возможен в тех случаях, когда они ведут поиск подводных лодок в разомкнутом строю, то есть когда расстояние между двумя смежными кораблями Дк-к превышает две дальности действия их гидроакустических средств наблюдения 2dк, в результате чего между ними остается непросматриваемый участок.
Одним из примеров является атака Конвоя противника подводной лодкой "С-56" [62]: "На четвертый день поиска мы снова встретили врага.
Круглов услышал шум винтов <...> через несколько минут показались дымы и много мачт. Идет конвой. В его составе я вижу три транспорта, шесть сторожевиков, несколько больших охотников.
Решаю прорваться с головы, пройти между транспортами и охранением, развернуться и, по возможности одновременно, атаковать: носом - транспорты, кормой - один из сторожевиков <...> нас обнаружили. Два корабля охранения устремляются к нам
<...> Быстро созревает решение: нырнуть под транспорт, укрыться под ним от бомбежки, вынырнуть с другого борта и атаковать кормой
<...> Противник не ожидает, что мы продолжим атаку
<...> Осторожно подвсплываем с противоположного борта <...> Стреляю по концевому транспорту конвоя. Дистанция минимальная <...> взрыв слышат все".
В связи с наличием у подводной лодки, прорывающей строй противолодочных кораблей, ошибок в определении мест кораблей относительно подводной лодки, а следовательно, и в определении места прорыва строя, скрытный прорыв не всегда гарантируется. Вероятность скрытного прорыва строя противолодочных кораблей можно определить по формуле [50]
| Рпр = Фˆ ( | Дк-к - 2dк | ), |
| 2Е |
где Фˆ - приведенная функция Лапласа, выбираемая из математических таблиц и справочников;
Е - срединная ошибка в определении места прорыва строя кораблей.
Например при Дк-к = 80 каб, dк = 30 каб и Е = 5 каб вероятность скрытного прорыва будет
| Рпр = Фˆ ( | 80 - 2 ⋅ 30 | ), |
| 2 ⋅ 5 |
то есть Рпр = Фˆ(2,0) = 0,823.
В случае обнаружения подводной лодки противолодочными кораблями и установления признаков их атаки подводная лодка должна контратаковать их и применить средства гидроакустического подавления для прерывания или затруднения поддержания гидроакустического контакта с подводной лодкой и создания помех системам самонаведения противолодочных торпед. После выполнения торпедной атаки подводная лодка выполняет маневр отрыва от противолодочных кораблей охранения, для чего, как правило, приводит противника на свои кормовые курсовые углы, увеличивает скорость и занимает глубину наибольшей скрытности.
Один из таких боевых эпизодов описал Герой Советского Союза капитан 2 ранга И. И. Фисанович [55]: "Командир сидит на комингсе люка, приоткрытого во второй отсек, и слушает доклады акустика. Шумихин, полуоглушенный грохотом, во сто крат усиленным в его наушниках, ухитряется в коротких паузах выхватить из какофонии боя шумы винтов вражеских кораблей. Морщась от боли в ушах, он докладывает командиру направления и изменения расстояний до врага. Руководствуясь этими данными, командир производит маневры уклонений от глубинных бомб. Несколько атакующих кораблей несутся на лодку с разных направлений. Предупрежденный об этом акустиком, Фисанович командует на руль и увеличивает ход. <...> Бутов за штурманским столом аккуратно вырисовывает все циркуляции ускользающей из-под ударов лодки".
Кроме того, по опыту Великой Отечественной войны подводные лодки могут осуществлять подныривание под один из транспортов конвоя для отрыва от противолодочных кораблей. Так, например, подводная лодка "С-56" (командир - капитан-лейтенант Г. И. Щедрин) при атаке конвоя противника 10 апреля 1943 г. была обнаружена и атакована кораблями охранения. Осуществив подныривание под транспорт, подводная лодка оторвалась от преследования и успешно атаковала транспорт с другого борта.
При встрече с корабельной поисково-ударной группой противника на переходе морем подводная лодка, как правило, выполняет маневр выхода из ее полосы обследования [49]. При наличии преимущества у подводной лодки в дальности обнаружения, а также при движении КПУГ постоянным курсом и скоростью, большей, чем у подводной лодки (при преимуществе в скорости подводная лодка всегда имеет возможность выйти из полосы поиска), маневрирование ее для выхода из полосы обследования рассчитывается следующим образом (рис. 3.6). Определяются координаты кораблей относительно подводной лодки, их элементы движения и рассчитывается ширина полосы их поиска, в результате чего оценивается положение подводной лодки относительно противника. Для уклонения от противолодочных кораблей на дистанции, превышающей дальность действия их гидролокаторов, производится следующее построение. Из начальной позиции К01 ближайшего флангового корабля КПУГ описывается окружность радиусом, равным избранной дистанции уклонения Дукл. Из позиции подводной лодки Л0 проводится касательная к этой окружности, которая является линией относительного движения подводной лодки при расхождении ее с этим кораблем. При точке касания строится скоростной треугольник, а в случае пересечения линии относительного движения вектором скорости подводной лодки - два треугольника, в результате чего определяется курс подводной лодки для выхода ее из полосы обследования КПУГ или сектор возможных курсов от Кл1 до Кл2. В последнем случае конкретный курс выбирается и ходя из тактической обстановки.
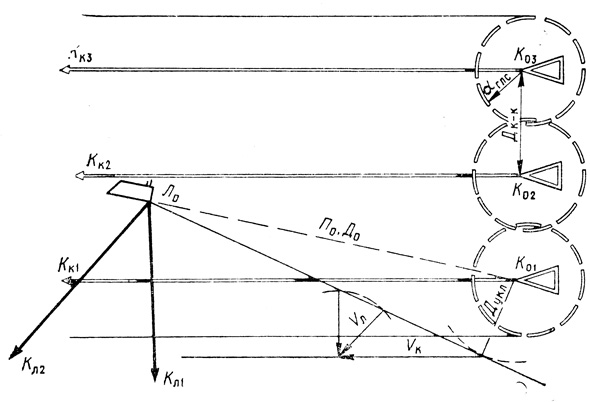
Рис. 3.6. Выход подводной лодки из полосы, обследуемой корабельной поисково-ударной группой противника
В ходе преодоления противодействия противолодочных кораблей необходимо учитывать не только их боевые возможности и тактику действий, но и влияние на их деятельность физико-географических условий района. Большая удаленность района боевых действий от пунктов базирования противолодочных кораблей при ограниченных дальности плавания и автономности делает невозможным длительный поиск подводных лодок в таком районе. Надводные корабли не способны вести боевые действия против подводных лодок в замерзающих морях и арктических районах. Действия противолодочных кораблей значительно зависят от погоды - в штормовых условиях уменьшается скорость хода, качка существенно влияет на возможности средств обнаружения, использование противолодочного оружия и палубных вертолетов. Волнение моря создает помехи гидроакустическим станциям и радиогидроакустическим буям, перемешивает и размывает кильватерный след подводной лодки, уменьшает зрительную и радиолокационную заметность. Низкие температуры воды и воздуха приводят к обледенению оружия и технических средств на открытых боевых постах и снижают боевые возможности противолодочных кораблей. В условиях малой видимости противолодочные корабли вынуждены активно использовать радиолокацию и средства внутриэскадренной связи, что снижает их скрытность.
При нахождении подводной лодки в районе действия противолодочных кораблей вахтенный офицер осуществляет контроль за организацией наблюдения за надводной обстановкой, при нахождении подводной лодки на перископной глубине ведет тщательное зрительное наблюдение в перископ, а также с помощью станции обнаружения радиолокационных сигналов. Он должен знать тактическую обстановку в районе плавания: какие корабли противника и с каких направлений можно ожидать, их отличительные признаки и демаскирующие факторы, характеристику и возможности средств обнаружения подводной лодки противником.
При внезапной встрече с противолодочными кораблями противника вахтенный офицер выполняет первоначальные действия: объявляет боевую тревогу и докладывает командиру подводной лодки об обнаружении противника; изменяет скорость подводной лодки в соответствии с обстановкой и начинает погружение на наиболее выгодную в гидрологическом отношении глубину; начинает определение элементов движения цели, дистанции до нее и строя корабельной поисково-ударной группы противника; приводит в готовность оружие и средства гидроакустического подавления.
В ходе преодоления подводной лодкой противодействия маневренных противолодочных сил (противолодочной авиации, надводных кораблей) в ходе военных действий она вынуждена не только уклоняться от этих сил, но и организовывать защиту от самонаводящихся торпед, а также мин-торпед противника.
Защита от самонаводящихся торпед проводится в целях снижения эффективности применения противником самонаводящихся торпед и является составной частью радиоэлектронной борьбы [13]. Помимо тактических приемов уклонения от торпед изменением курса, скорости хода и глубины погружения она включает: уничтожение самонаводящихся торпед; подавление помехами их аппаратуры наведения; создание ложных гидроакустических целей, воспроизводящих шумы, ультразвуковые и другие излучения; выбор малошумных режимов движения и снижение шумности механизмов.
При обнаружении шума винтов торпеды вахтенный офицер в отсутствие на ГКП командира подводной лодки немедленно предпринимает действия по уклонению от торпеды. Для этого он объявляет боевую тревогу и сразу же начинает решительные действия по выполнению маневра курсом, скоростью хода и глубиной погружения с одновременным использованием средств гидроакустического подавления в соответствии с правилами уклонения от торпед и конкретной обстановкой, для чего он должен твердо знать эти правила и выполнять их, учитывая ограниченность времени от момента обнаружения торпеды до ее сближения с подводной лодкой. Вот как об этом пишет Г. И. Щедрин [62]: "Серебристый след торпеды первым заметил вахтенный офицер В. Ф. Паластров.
- Право на борт! Самый полный вперед!
Скорее автоматическая, чем осознанная, команда была единственно правильной <...> Когда я выскочил на мостик, торпеда проходила в десяти метрах от борта лодки <...> зорким и искусным оказался вахтенный офицер на мостике советской лодки".
Противоминная оборона подводной лодки организуется с целью уменьшения или исключения вероятности подрыва ее на минах противника. Для снижения минной опасности ведется поиск мин станцией миноискания, принимаются меры для поддержания уровней физических полей подводной лодки, главным образом акустического и магнитного, в пределах установленных норм.
При подготовке подводной лодки к боевому походу на основе анализа имеющихся разведывательных данных и физико-географических условий района действий устанавливаются расположение и плотность минных заграждений противника, образцы применяемых мин [26]. На основе оценки минной обстановки для уменьшения вероятности встречи с минами и вероятности подрыва подводной лодки выбираются оптимальные маршруты (курсы), скорости хода и глубины погружения. При невозможности обхода предполагаемого района минного заграждения курс подводной лодки должен быть по возможности перпендикулярным линии выставленных мин или предполагаемому ее направлению для сокращения времени форсирования минного заграждения и повышения вероятности безопасного прохода подводной лодки между смежными минами.
Глубина погружения выбирается в зависимости от предполагаемого типа мин: при их малом заглублении подводная лодка должна находиться ближе к грунту; при наличии донных мин - ближе к поверхности моря на безопасном расстоянии для реагирования неконтактного взрывателя мины. По возможности необходимо использовать морские приливы, проходя над минным заграждением из якорных мин в период полной воды и максимального течения. Скорость подводной лодки при форсировании минного заграждения должна соответствовать минимальным значениям акустического и гидродинамического полей корабля с целью уменьшения радиуса реагирования неконтактных взрывателей мин.
Место форсирования выбирается с учетом глубин моря, плотности и протяженности минного заграждения, учитываются также освещенность и гидрометеорологические условия (течение, волнение моря, ветер, фаза прилива, видимость). До начала форсирования убираются все выдвижные устройства и заваливаются носовые горизонтальные рули, подводная лодка поддиферентовывается для управления по глубине и дифференту только кормовыми горизонтальными рулями. Перед форсированием минного заграждения, границы которого известны, необходимо тщательно определить свое место.
В целях своевременного обнаружения мин должна быть открыта гидроакустическая вахта на станции миноискания, а при ее отсутствии - на штатной гидроакустической станции в режиме эха. Поиск мин ведется в секторах на оба борта с учетом технических возможностей станции и радиуса реагирования мин. С получением доклада гидроакустика об обнаружении мины определяют курсовой угол на нее и дистанцию и при необходимости изменяют курс подводной лодки в безопасную сторону с расчетом пройти ее на расстоянии, превышающем радиус реагирования неконтактного взрывателя. При повороте необходимо поддерживать контакт с обнаруженной миной до прохода ею траверза подводной лодки [49]. При определении необходимого угла отворота от мины следует учитывать направление и скорость морского течения.
Советские подводные лодки в ходе Великой Отечественной войны приобрели определенный опыт форсирования минных заграждений с использованием гидролокатора. Так, например, в сентябре 1943 г. подводная лодка Северного флота (командир - капитан-лейтенант Г. Ф. Макаренков) 14 раз успешно уклонялась от мин, используя гидролокатор. Немало и других примеров форсирования минных заграждений подводными лодками с использованием гидролокатора, в том числе и подводной лодкой "С-56", о чем рассказывает ее бывший командир [62]: "Все внимание акустика сосредоточено на эхопоиске. Проходим опасный в минном отношении район. Слышен однообразный писк посылок. В наушниках послышался еле заметный щелчок. Прямо по курсу лодки. Эхо от малого препятствия. Вначале оно угадывалось только на слух. Но вот в записи на ленте рекордера появились точки.
- Мины!
Начинаем маневрировать. По-видимому, мы оказались на минной банке. В течение двадцати минут обошли восемь мин <...>"
При касании бортом минрепа якорной мины необходимо остановить двигатель того борта, со стороны которого произошло касание, и одновременно переложить вертикальный руль в ту же сторону для отвода кормы подводной лодки от мины. После прохода мины подводная лодка ложится на прежний курс.
Безопасное форсирование минного заграждения при надежном наблюдении с помощью станции миноискания возможно в том случае, когда расстояние между двумя смежными минами dм-м превышает величину двух опасных радиусов мины rо, то есть радиусов реагирования неконтактных взрывателей мин или радиусов реагирования мин-торпед типа "Кэптор". Однако из-за наличия ошибок в определении мест смежных мин относительно подводной лодки, неточности удержания курса подводной лодкой и влияния течения безопасный проход между минами и в этом случае не гарантирован, а может быть оценен вероятностью неподрыва подводной лодки на минах Рнпл м, которая рассчитывается по формуле [50]
| Рнпл м = Фˆ ( | dм-м - 2ro | ), |
| E |
где Фˆ - приведенная функция Лапласа;
Е - срединная ошибка в определении места прохода между минами.
При большой плотности минных заграждений и отсутствии возможности безопасного прохода между минами подводная лодка, используя гидролокатор, может определить направление линии мин и, ведя наблюдение за обстановкой, предпринять поиск свободного прохода или обходного пути.
При плавании подводной лодки в районе минной опасности вахтенный офицер организует бдительное несение вахты всем составом своей боевой смены, особенно на средствах гидроакустического наблюдения, строго выдерживает назначенные командиром подводной лодки глубину погружения, курс и режим движения, поддерживает установленную готовность средств гидроакустического подавления для уклонения от мин-торпед типа "Кэптор". Он должен иметь таблицу углов отворота от обнаруженной мины для расхождения с ней на безопасном расстоянии и уметь ею пользоваться, по индикатору станции миноискания контролировать обстановку в назначенном секторе поиска и уметь своевременно предпринять действия по уклонению от обнаруженной мины. Для этого он должен знать направление и скорость течения в районе плавания, а также маневренные качества своей подводной лодки и уметь управлять ею по курсу в сложных условиях после обнаружения мины, учитывая шаг и количество работающих гребных винтов, особенности управления подводной лодкой на заднем ходу и при работе машин враздрай.
Один из случаев быстрых и правильных действий при уклонении подводной лодки "С-56" от мины описывает Г. И. Щедрин [62]:
"- Прямо по носу мина!.. - как ни старается Подковырин быть спокойным, в голосе его слышна тревога.
- Право руля! Право на борт!
<...> - Руль право на борту! Лодка покатилась вправо!
Это докладывает из боевой рубки рулевой Немальцев.
Как медленно идет циркуляция <...> До чего быстро приближается мина! Сейчас столкнемся <...> Нет <...> Форштевень проходит в полутора-двух метрах правее. Красноватый от ржавчины корпус мины качается на волне у самого борта. Теперь поскорее отбросить корму.
- Лево на борт.
Удалявшаяся было мина снова приблизилась. Но лодка уже поворачивает влево. Секунда - и смертоносный снаряд, пройдя в метре от среза кормы, закачался в кильватерной струе <...>"
В ходе Великой Отечественной войны немецко-фашистское командование пыталось в Финском заливе полностью блокировать советские подводные лодки. Были созданы мощные гогландский и нарген-порккалауддский противолодочные рубежи, т. е. системы минно-сетевых заграждений, средств обнаружения и противолодочных сил. Вдоль минных заграждений располагались дозоры противолодочных кораблей. Противолодочные позиции опирались на береговую систему наблюдения, включающую радиолокационные и шумопеленгаторные станции, наблюдательные посты. Противолодочные самолеты вели активную разведку районов возможного местонахождения советских подводных лодок. Несмотря на это, подводные лодки Балтийского флота летом и осенью 1942 г. неоднократно прорывали блокаду и успешно действовали в Балтийском море. Участок от Ленинграда до Кронштадта подводные лодки проходили в темное время суток по протраленному фарватеру в обеспечении тральщиков, сторожевых катеров-дымозавесчиков, береговой артиллерии и авиации. От Кронштадта до рейда о. Лавенсари подводные лодки также следовали по протраленным фарватерам в обеспечении дозоров из сторожевых кораблей и малых охотников за подводными лодками (подкласс противолодочных кораблей военного и первого послевоенного времени) [26]. Далее подводные лодки в подводном положении самостоятельно форсировали противолодочные рубежи. Наибольшую опасность в этих случаях для подводных лодок представляли мины. Однако приведенный пример может быть также иллюстрацией создания противником противолодочного рубежа и форсирования его подводными лодками как самостоятельно, так и в обеспечении других сил флота.
Преодоление подводными лодками минной опасности как одного из факторов противолодочного рубежа также осуществляется не только самостоятельно, но и в обеспечении других сил и средств флота.
Противоминное обеспечение - это комплекс мероприятий, осуществляемых силами флота в целях безопасности кораблей от подрыва на минах противника в районах базирования, на переходе морем и в районах боевых действий. В интересах противоминного обеспечения организуются [13]:
- противоминное наблюдение и оповещение подводных лодок об обнаруженных минах в районах базирования, на маршрутах развертывания подводных лодок и в районах их боевых действий;
- определение границ минных заграждений, поиск обходных путей и проводка подводных лодок за тралами;
- проделывание в минных заграждениях безопасных проходов (фарватеров), траление и уничтожение мин.
Из всех мероприятий противоминного обеспечения выделим только проводку подводных лодок за тралами, в которой они непосредственно участвуют [13, 48].
Проводка кораблей за тралами имеет целью обеспечить их безопасность при плавании в миноопасных районах моря. Она может осуществляться в водах, контролируемых противником (при участии других сил обеспечения), и в своих водах, когда после проведенного траления противник поставил мины вновь или в них применены приборы неизвестной кратности и срочности. Проводка за тралами выполняется также для обеспечения экстренного перехода (выхода) подводных лодок через назначенный миноопасный район. Тральщики, осуществляющие проводку, следуют с поставленными тралами впереди по курсу проводимых подводных лодок обычно в строю уступа или парами в зависимости от типа применяемого трала. Число тральщиков определяется из необходимой надежности обеспечения безопасности проводимых кораблей, степени минной опасности и наличия в распоряжении тральных кораблей. Проводимые подводные лодки следуют по протраленной полосе в строю кильватера на заранее установленных друг от друга расстояниях. Удаление от концевого тральщика (или их пары) должно обеспечивать безопасность от воздействия взрывной волны мины, подорванной тралом, и возможность уклонения подводной лодки от подсеченной плавающей мины. Число подводных лодок, одновременно проводимых за тралами, определяется с таким расчетом, чтобы концевая подводная лодка не вышла из границ протраленной полосы.
Опыт второй мировой, Великой Отечественной и локальных войн послевоенного периода убедительно показывает, что в условиях массового применения минного оружия готовность подводных лодок к преодолению минной опасности, в том числе и к форсированию минных заграждений, сохраняет в настоящее время важное значение.
При комплексном использовании противником своих маневренных противолодочных сил, стационарных и позиционных средств обнаружения и заграждения, то есть при создании им противолодочных рубежей (системы эшелонированных по глубине противолодочных позиций, противолодочных заграждений и противолодочных сил, развертываемых в узкостях или в открытом районе моря с целью не допустить проникновения подводных лодок противника в обороняемую зону), подводные лодки будут вынуждены форсировать эти рубежи.
Подводные лодки форсируют противолодочные рубежи самостоятельно или в обеспечении других сил флота (в последнем случае, как правило, при массовом или групповом развертывании подводных лодок, особенно ракетных) [13, 48]. Полоса перехода подводных лодок выбирается с учетом ожидаемого на рубеже противодействия противника, наличия его выявленных стационарных гидроакустических систем, позиционных средств заграждения, а также состава и боевых возможностей прорывающихся подводных лодок, навигационно-гидрографических и гидрометеорологических условий. При определении ее ширины учитывается необходимость уклонения подводных лодок от маневренных противолодочных сил противника и обхода выявленных минных заграждений. При форсировании противолодочного рубежа подводные лодки, как правило, следуют в подводном положении на глубинах и со скоростями хода, при которых обеспечиваются наибольшие дальности действия своих гидроакустических средств наблюдения и минимальная вероятность обнаружения подводных лодок силами и средствами противника. Способы действий подводных лодок по обеспечению скрытности, уклонению от противолодочных сил и средств противника, а также от его оружия на каждом участке противолодочного рубежа выбираются в зависимости от тактической обстановки на данном участке, то есть от того, какие противолодочные силы и средства на этом участке представляют наибольшую угрозу для подводной лодки.
Успешность форсирования противолодочных рубежей достигается всесторонним обеспечением: ведением разведки на всю глубину рубежа; нанесением согласованных с движением подводных лодок ударов по противолодочным силам противника на рубеже, в базах и на аэродромах, по стационарным гидроакустическим средствам обнаружения в сочетании с действиями по проделыванию проходов в позиционных заграждениях; проведением маскировочных мероприятий и демонстративных действий для введения противника в заблуждение относительно действительного места прорыва подводных лодок. Для обеспечения привлекаются самолеты (разведывательные, противолодочные, штурмовики и истребители), противолодочные вертолеты, специально выделенные многоцелевые подводные лодки, а также надводные корабли - противолодочные и ракетные.
Критерием оценки эффективности преодоления подводной лодкой противодействия противолодочных сил в мирное время является вероятность необнаружения подводной лодки этими силами, а в военное время - вероятность неуничтожения подводной лодки. При комплексном использовании противником противолодочных сил вероятность необнаружения Рно может быть определена по формуле
а вероятность неуничтожения Рнул - по формуле
где Ро плав, Ро ппл, Ро нк, Рос ГАС - вероятности обнаружения подводной лодки противолодочной авиацией, подводными лодками, надводными кораблями и стационарной гидроакустической системой противника соответственно;
Рунл плав, Рунл ппл, Рунл нк - вероятности уничтожения подводной лодки каждым родом маневренных противолодочных сил противника;
Рпл м - вероятность подрыва подводной лодки на минах.
Вероятность уничтожения подводной лодки каждым родом маневренных противолодочных сил определяется вероятностью ее обнаружения Роб данным родом сил и вероятностью поражения Wп подводной лодки соответствующим видом противолодочного оружия* и рассчитывается по общей формуле Pунл = PобWп, а вероятность подрыва на минах равна Рпл м = 1 - Рпл м.
* (Правила расчета вероятностей обнаружения рассмотрены в гл. 4, а вероятностей поражения оружием - в гл. 5.)
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'