4.2. Поиск и наблюдение
Поиск противника в море (океане) является основным способом ведения разведки подводными лодками, так как слежение за противником организуется после его обнаружения в результате поиска, а наблюдение является пассивным по сравнению с поиском. В зависимости от объема информации о месте нахождения противника, элементах его движения и обстановки поиск может производиться в заданном районе, на рубеже и в назначенной полосе [48].
Поиск в заданном районе применяется в тех случаях, когда место противника точно неизвестно и можно лишь предполагать, что он находится в данном районе, или когда необходимо убедиться, что противник вообще отсутствует в этом районе. Для поиска могут использоваться данные первичного обнаружения, полученные от других источников информации. Поиск в заданном районе представляет такую поисковую ситуацию, когда положение объекта поиска в любой точке заданного района равновероятно и его возможные курсы равномерно распределены от 0 до 360°, а также когда возможен проход цели через заданный район с любого направления [29]. Он может осуществляться при маневрировании подводной лодки параллельными курсами с последовательным обследованием всего района с минимальными перекрышами обследованных полос (рис. 4.1.) или случайными курсами при незакономерном обследовании района (рис. 4.2).
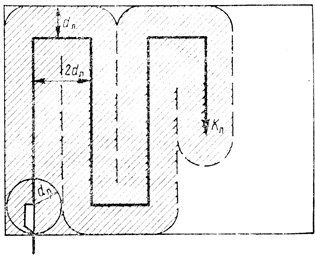
Рис. 4.1. Поиск параллельными курсами в заданном районе
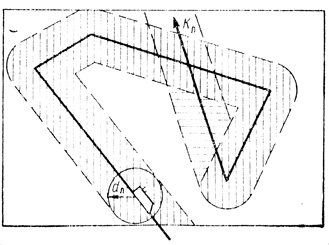
Рис. 4.2. Поиск случайными курсами в заданном районе
Эффективность поиска оценивается вероятностью обнаружения объекта поиска Роб за отведенное для поиска время. Она зависит от целого ряда факторов, таких, как дальности действия средств наблюдения подводной лодки dл и противника dпр, их скорости хода (Vл и Vпр соответственно), относительная скорость поиска Vρ, дистанция между противником и подводной лодкой в момент начала противником маневра уклонения от обнаружения Дукл в тех случаях, когда противник имеет преимущество в дальности обнаружения перед подводной лодкой (Дукл принимается равным 0,8 dпр). Роб зависит также от размеров района поиска Sp, отведенного на поиск времени Tп, вероятности получения контакта с целью Рк в пределах дальности обнаружения и определяется по формуле
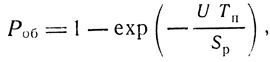
где U - производительность поиска (в ряде источников - поисковая производительность) с учетом вероятности неуклонения противника от обнаружения Рнукл и вероятности получения контакта Рк.
Относительная скорость поиска определяется по формуле

Вероятность неуклонения противника от обнаружения определяется по формуле

где Vукл - скорость противника при уклонении.
Уклоняться от обнаружения подводными лодками могут только подводные лодки. Надводные корабли всегда уступают подводным лодкам в дальности обнаружения и уклониться от обнаружения подводными лодками не могут, то есть Pнукл = 1,0. Кроме того, при поиске подводных лодок следует учитывать, что при наличии у подводной лодки противника существенного преимущества в дальности обнаружения перед подводной лодкой, производящей поиск (при dл < Dукл = 0,8 dпр), она всегда имеет возможность уклониться от обнаружения, а вероятность ее обнаружения равна нулю. В таких ситуациях применяются другие способы поиска, в частности дискретный поиск. При расчетах вероятности обнаружения при поиске в заданном районе следует иметь в виду, что время поиска Тп - это отведенное подводной лодке время на поиск при условии, что объект поиска в это время также находится в районе поиска.
В условиях, когда объект поиска не находится постоянно в районе поиска, но возможен его проход через заданный район с любого направления, вероятность его обнаружения определяется по формуле
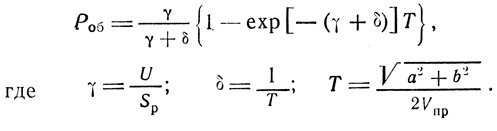
Здесь а и b - стороны района поиска прямоугольной формы;
Т - средняя продолжительность пребывания объекта поиска в районе.
Сущность дискретного поиска (рис. 4.3) состоит в чередовании обследования среды средствами наблюдения на стопе (или на малом ходу) с перемещением в следующую позицию наблюдения на большой скорости. Во время перехода в очередную позицию наблюдение практически прекращается из-за больших помех гидроакустическим средствам наблюдения, возникающих на больших скоростях, и вести его возможно только в период обследования водной среды на малом ходу [1, 29]. Время цикла поиска tц включает время на обследование водной среды tобc и время на переход в очередную позицию обследования tпер, то есть

где tпер = l/Vпер.
Здесь l - расстояние между соседними позициями наблюдения;
Vпер - скорость подводной лодки на переходе из одной позиции в другую.
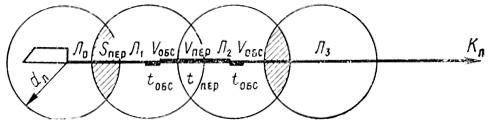
Рис. 4.3. Ведение подводной лодкой дискретного поиска
Поисковая производительность при дискретном поиске определяется по формуле
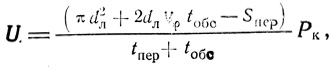
где Sпер - площадь перекрытия зон наблюдения в двух смежных позициях наблюдения.
При планировании поисковых действий возникает необходимость определения времени поиска в районе для обеспечения заданной вероятности обнаружения противника Роб.з и, наоборот, когда время поиска ограничено, необходимо определить размеры района поиска, в котором обеспечивается обнаружение объекта поиска с заданной вероятностью. В этих случаях используются формулы [1]:

В тех случаях, когда в обширном районе организуется поиск несколькими подводными лодками, имеющими различную поисковую производительность (разные гидроакустические станции, комплексы), весь район разбивается на участки для каждой подводной лодки, размеры которых пропорциональны поисковым производительностям и определяются по формуле
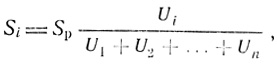
где i = 1, 2 ... n - общее число подводных лодок.
Поиск на рубеже осуществляется на вероятных путях развертывания надводных кораблей и подводных лодок противника, на выходах его из баз, в проливах, узкостях, на подходах к районам базирования или боевых действий своих сил, а также в тех случаях, когда есть достаточные основания предполагать, что проход противника будет совершен через данный рубеж. При этом поисковые силы имеют задачу не допустить прохода объекта поиска через данный рубеж необнаруженным. Поиск на рубеже ведется, когда известен вероятный курс или сектор вероятных курсов противника, и осуществляется при маневрировании подводной лодки курсами, перпендикулярными вероятному курсу объекта поиска (рис. 4.4). Вероятность обнаружения цели в этом случае определяется по формуле [29]
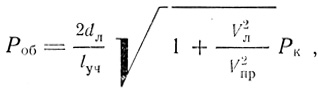
где lуч - длина участка, обследуемого одной подводной лодкой.
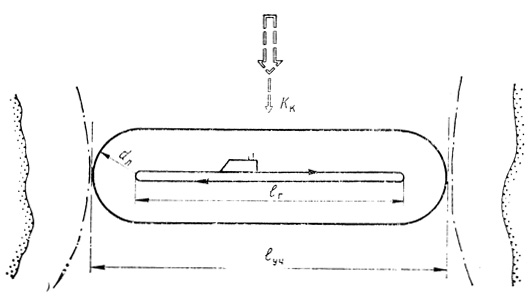
Рис. 4.4. Поиск на рубеже (lг - длина галса подводной лодки)
Поиск в назначенной полосе ведется на вероятных маршрутах перехода морем соединений боевых кораблей, конвоев, десантных отрядов и осуществляется при движении подводной лодки, ведущей поиск, навстречу противнику контркурсом (рис. 4.5). Вероятность обнаружения при этом определяется по формулам:
Роб = 2dл/H - для одной подводной лодки;
| Роб = | 2dл + (Nл - 1) Дл-л | - для Nл подводных лодок, |
| Н |
где Дл-л - расстояние между смежными подводными лодками;
Н - ширина вероятной полосы движения противника.
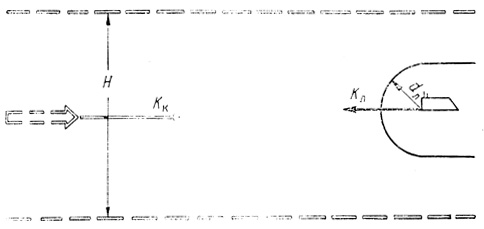
Рис. 4.5. Поиск противника в вероятной полосе его движения
При наличии данных первичного обнаружения противника другими силами и средствами (его координат и элементов движения) применяется поиск в вероятном секторе курсов объекта поиска, который выполняется выходом на вероятный курс противника впереди него с последующим движением прямо навстречу (рис. 4.6). При этом необходимо определить [1]:
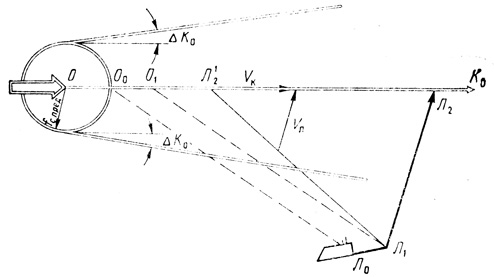
Рис. 4.6. Поиск противника в вероятном секторе курсов с выходом подводной лодки на его курс
- сектор, в пределах которого вероятно движение противника;
- расстояние, на котором подводная лодка должна выйти вперед по курсу противника;
- курс и время для выхода на это расстояние заданной скоростью хода;
- рубеж встречи с противником;
- дистанцию между подводными лодками при движении навстречу при групповом поиске.
Для этого на карту наносится место противника на данный момент (точка О) и проводится его курс К0. Вокруг точки О радиусом, равным предельной суммарной погрешности в местах противника и подводной лодки fс пред, описывается окружность, к которой проводятся две касательные под углом, равным погрешности в определении курса противника ΔК0, к его курсу. В пределах образовавшегося сектора следует осуществлять поиск противника. Для определения расстояния, на котором подводная лодка должна выйти на курс противника впереди него, от границы окружности по направлению курса цели откладываются путь объекта поиска (отрезок ОО1, проходимый максимальной скоростью хода за время от его первичного обнаружения до начала движения подводной лодки из исходной позиции Ли и дальность обнаружения противника подводной лодкой (отрезок О1Л12). Для определения курса выхода подводной лодки на это расстояние решается задача сближения вплотную с точкой Л12, для чего при этой точке строится треугольник скоростей и подобный ему треугольник путей. Сторона Л1Л2 треугольника определяет курс выхода и расстояние, которое необходимо пройти. После выхода на курс противника подводная лодка, как правило, ложится на контркурс и начинает поиск. При групповом поиске, если общая ширина полосы поиска группы (завесы) подводных лодок не менее ширины сектора вероятного движения противника, подводные лодки распределяются в секторе равномерно. Если же общая ширина полосы поиска группы (завесы) подводных лодок меньше ширины сектора вероятного движения противника, то подводные лодки целесообразно располагать в середине сектора симметрично относительно курса объекта поиска там, где плотность распределения вероятности места объекта будет наибольшей, на расстояниях, не превышающих двух дальностей действия средств наблюдения подводной лодки (а при поиске групповой цели - с учетом ширины ее ордера, строя).
Вероятность обнаружения противника при поиске на его вероятном курсе одной подводной лодкой определяется по формуле
где Ф - функция Лапласа;
σ - среднеквадратическое отклонение, обусловленное погрешностями в местах цели, подводной лодки и в курсе цели;

Здесь mл - среднеквадратическая погрешность места подводной лодки в момент начала поиска;
mпр - среднеквадратическая погрешность места противника в момент его последнего наблюдения при первичном обнаружении;
Sпр - путь, пройденный противником от момента последнего обнаружения до рубежа встречи с подводной лодкой;
σк - среднеквадратическая погрешность в определении курса противника.
При ведении поиска группой (завесой) из Nл подводных лодок вероятность обнаружения противника определяется по формуле
Если скорость подводной лодки превышает скорость противника (Vл > Vпр), а ширина сектора вероятных курсов противника на рубеже встречи с подводной лодкой превышает ширину полосы, просматриваемой подводной лодкой (H > 2dл), то поиск в вероятном секторе курсов противника может выполняться последовательным обследованием сектора (рис. 4.7). Для этого необходимо определить точку начала поиска и курс выхода в нее, а также последующие курсы поиска в пределах сектора.
Рис. 4.7. Поиск противника в вероятном секторе его курсов последовательным обследованием сектора
Точка начала поиска и курс выхода в нее определяются из предположения, что противник движется по ближайшей к подводной лодке границе сектора К01 максимальной скоростью, для чего решается задача сближения вплотную и находится точка начала поиска Л1. Расчет последующих курсов поиска состоит в последовательном решении задачи сближения вплотную с точками, в которых будет находиться цель через равные промежутки времени Δt при следовании в пределах сектора любым постоянным курсом и максимальной скоростью.
Для этого определяются радиусы ri = Vпрtл + iΔVпрΔt, где tл - время выхода подводной лодки в точку Л1(i = 0); ΔVпр - предельная погрешность в определении скорости противника. Из точки О проводятся дуги радиусом ri, которые засекаются дугами с радиусами, равными пути подводной лодки за тот же промежуток времени Δt. Прямые, соединяющие полученные засечки на дугах, представляют собой последовательные курсы поиска.
Если к моменту выхода подводной лодки в точку Л4 цель не обнаружена, то следует предположить, что ее скорость меньше принятой в расчет, а движется она по границе К02 сектора, и лечь на контркурс. Если в точке Л5, рассчитанной с учетом движения меньшей скоростью, цель не обнаружена, то делается расчет для обследования сектора вероятных курсов в обратную сторону описанным выше способом к границе сектора К01. При незначительном преимуществе подводной лодки в скорости хода над объектом поиска поиск целесообразно вести дискретно, то есть движение между точками изменения курса осуществлять на повышенной скорости, а в точках изменения курса обследовать водную среду на скорости, обеспечивающей максимальные дальности обнаружения.
Выбрав, исходя из обстановки и поставленной задачи, способ поиска, командир должен определить оптимальные значения глубины погружения при поиске и скорости хода подводной лодки, а также режим использования средств наблюдения.
Для выбора глубины погружения подводной лодки определяют тип вертикального распределения скорости звука (ВРСЗ) в воде. В зависимости от типа вертикального распределения скорости звука и типа цели (надводный корабль или подводная лодка) выбирают глубину погружения, обеспечивающую наибольшую дальность действия гидроакустических средств. Скорость хода при поиске в сочетании с дальностью обнаружения должна при поиске в заданном районе обеспечить максимальную поисковую производительность, а при поиске на рубеже - максимальную вероятность обнаружения. Как видно из анализа формул поисковой производительности, из входящих в них величин со стороны командира ведущей поиск подводной лодки регулируемой является только скорость поиска при выбранной глубине погружения. При увеличении скорости до определенного предела возрастает и поисковая производительность. Но при определенном значении скорости за счет возрастания помех гидроакустическому комплексу уменьшается дальность обнаружения объекта поиска, что в свою очередь ведет к снижению поисковой производительности. Для определения оптимальной скорости поиска производят расчет дальностей обнаружения цели для ряда скоростей поиска и принимают ту скорость, которая обеспечивает максимальное значение поисковой производительности.
Аналогично поступают при организации поиска на рубеже, но через вероятность обнаружения цели.
При поиске в назначенной полосе увеличение скорости не может привести к увеличению вероятности обнаружения противника, а при определенных значениях за счет возрастания уровня собственных помех гидроакустическим средствам поиска оно может привести только к снижению вероятности обнаружения цели за счет уменьшения дальности действия гидроакустических средств. Дальности действия гидроакустических средств рассчитываются по специальным графикам в зависимости от соотношения уровней полезного сигнала и помехи с учетом типа гидроакустических условий. Уровни полезных сигналов, то есть уровни шумов различных кораблей противника, определяются по справочникам для каждой скорости цели, установление этих уровней является одной из задач разведки вообще и в частности гидроакустической, ведущейся подводными лодками.
Выбор командиром подводной лодки режима использования технических средств наблюдения и разведки определяется характером объекта поиска. Поиск подводных лодок, как правило, осуществляется с использованием гидроакустических средств в пассивных режимах и неакустических средств. К числу основных демаскирующих признаков надводных кораблей кроме гидроакустического поля относится также электромагнитное поле радиолокационных станций наблюдения за надводной и воздушной обстановкой, станций управления оружием, средств радиосвязи. Поэтому при поиске надводных кораблей радиоэлектронные средства наблюдения и разведки используются комплексно, для чего подводная лодка периодически всплывает на перископную глубину с целью ведения радио- и радиотехнической разведки. С обнаружением цели производится ее классификация по различным признакам, характерным для каждого типа цели (спектр частот шумов, частота вращения винтов, частота работающих гидролокаторов, характерный шум турбины или дизелей, несущая частота гидролокаторов, частоты и спектры средств радиосвязи и т. д.). Об обнаруженных целях, если они являются объектами поиска, доносят на командный пункт с указанием времени обнаружения, координат и элементов движения цели, ордера групповой цели и характера действий.
Ночные бабочки - DOSUGSAMARA.CLUB.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'