§ 2. Обработка информации о воздушной обстановке
Информация о воздушной обстановке поступает в оперативный центр от радиолокационных станций дальнего обнаружения и маловысотных постов сектора, а в ряде случаев также и от радиолокационных станций вынесенных постов наблюдения (наземных линий раннего предупреждения, кораблей, самолетов и дирижаблей радиолркационного дозора, "Техасских вышек"). Эта информация на радиолокационных станциях, оборудованных аппаратурой автоматического съема, проходит только первичную обработку, которая не обеспечивает полностью отсева ложных целей и случайных помех. На радиолокационных станциях нет возможности исключить ненужную информацию и ввести дополнительные данные о цели. Только в отдельных случаях (при несложной воздушной обстановке) операторы РЛС, обслуживающие аппаратуру, могут вводить в код сигнала о цели дополнительную информацию, в какой-то степени характеризующую эту цель. В связи с этим возникает необходимость контролировать и отфильтровывать входную радиолокационную информацию в оперативном центре и произвести полную и всестороннюю, так называемую вторичную обработку информации о воздушной обстановке, заключающуюся в уточнении и обобщении ее и в окончательном опознавании целей.
Контроль и фильтрация входной радиолокационной информации. Радиолокационная информация о целях, поступающая в оперативный центр в цифровом коде, состоит из двух следующих друг за другом с интервалом 10 мксек цифровых слов в параллельном коде. Первое слово состоит из 9 двоичных разрядов и содержит код номера РЛС (4 разряда) и коды дополнительных характеристик цели, в том числе и код типа цели (5 разрядов). Второе слово состоит из 22 двоичных разрядов и несет информацию об азимуте цели (12 разрядов) и дальности (10 разрядов).
Контроль и фильтрация входной информации о воздушной обстановке производятся операторами поста контроля входных радиолокационных данных с помощью специальной аппаратуры, состоящей из электронного цифро-аналогового вычислительного устройства и четырех пультов боевого управления с обычными индикаторами кругового обзора диаметром 16 дюймов (40 см). Электронное вычислительное устройство размещается в одном шкафу и состоит из двух отдельных частей: цифровой и аналоговой. В цифровую часть входят: дискриминатор слов, четыре входных регистра для хранения декодированного сообщения по частям, селектор РЛС и два селектора типа целей. Аналоговая часть состоит: из трех преобразователей "число - напряжение" (для дальности и составляющих азимута sin β и cos β), трех развязывающих усилителей, двух синусно-косинусных аппроксиматоров, двух множительных схем, двух усилителей мощности и двух отклоняющих усилителей.
Устройство с помощью логических схем расчленяет поступившее сообщение на части и направляет их по соответствующим каналам для дальнейшей обработки. Последующая обработка заключается в расшифровке кодов номера РЛС и типа цели и преобразовании кодов дальности и азимута цели в соответствующие им отклоняющие напряжения, которые могут быть поданы на электроннолучевую трубку индикатора.
На пульте оператора имеется клавиатура кнопочного управления, с помощью которой оператор может набрать коды номеров РЛС, информацию от которых он хочет просмотреть, и коды типов целей, в наличии или отсутствии которых он хотел бы убедиться. Набранные оператором на клавиатуре пульта коды номера РЛС и типа цели передаются в цифровую часть устройства, где они сравниваются с кодами первых слов каждого из сообщений, поступающих в оперативный центр. При совпадении кодов информация о координатах выбранных целей поступает на индикатор оператора для отображения.
Аппаратура контроля и фильтрации позволяет вызвать на экран индикатора для просмотра всю входную информацию о воздушной обстановке от любой радиолокационной станции сектора (аппаратура рассчитана на 15 РЛС). Кроме того, аппаратура позволяет различить и выдать на отображение 14 типов радиолокационных целей или объектов (таких, как: земля, корабль, облака, стая птиц, военный самолет противника, самолет гражданской авиации, ракета и т. д.). Наличие селектора типа цели дает возможность оператору определить, какие типы целей содержатся во входной радиолокационной информации, и произвести отсев ненужных сигналов.
В аппаратуре предусмотрено два режима работы: просмотр на индикаторе одного любого типа цели и просмотр всех типов целей одновременно. При просмотре только одного определенного типа цели оператор при необходимости может осуществлять автоматический ввод этих целей в основную вычислительную машину оперативного центра. Во втором случае оператор из наличия всевозможных сигналов может с помощью фотопистолета выбирать и вводить в машину только цели, представляющие интерес для ПВО (самолеты противника, свои истребители, ЗУРС и неопознанные цели), а явно ложные отфильтровывать. Отселектированная информация автоматически поступает на буферную память на барабанах вычислительной машины.
В обязанность каждого оператора контроля входных радиолокационных данных входит: вести наблюдение за воздушной радиолокационной обстановкой на заданном ему участке и контролировать работу аппаратуры, поскольку считается, что машина не всегда может правильно определить характер сигналов в информации, поступающей в оперативный центр от радиолокационных станций.
Уточнение и обобщение воздушной обстановки. Эта задача выполняется большим количеством операторов уточнения и обобщения воздушной обстановки в боевом посту того же названия (рис. 6.8). У каждого оператора имеется пульт боевого управления с характронным индикатором. Из своего поста операторы руководят всеми средствами обнаружения воздушных целей и при необходимости для уточнения обстановки связываются с радиолокационными станциями своего сектора и с соседними оперативными центрами.
Рис. 6.8. Операторы поста уточнения и обобщения воздушной обстановки
Обработка отфильтрованной радиолокационной информации, которая еще может содержать ложные цели, начинается в вычислительной машине с преобразования полярных координат целей в прямоугольную систему координат, привязанную к данному оперативному центру.
После преобразования координат (рис. 6.9) вновь поступившие данные о целях сравниваются с ранее поступившими данными и экстраполированными на момент получения новых данных. Машина по характеру траектории, величине скорости и ряду других признаков определяет совпадение или несовпадение данных. Если новые и экстраполированные данные о цели совпали в определенных допустимых пределах, то вычислительная машина, прокладывая курс этой цели, сглаживает его в соответствии с новыми данными и экстраполирует этот курс к следующему моменту поступления данных (периоду обзора РЛС). Этот курс поступает в запоминающее устройство экстраполированных курсов и на индикаторы операторов для отображения.
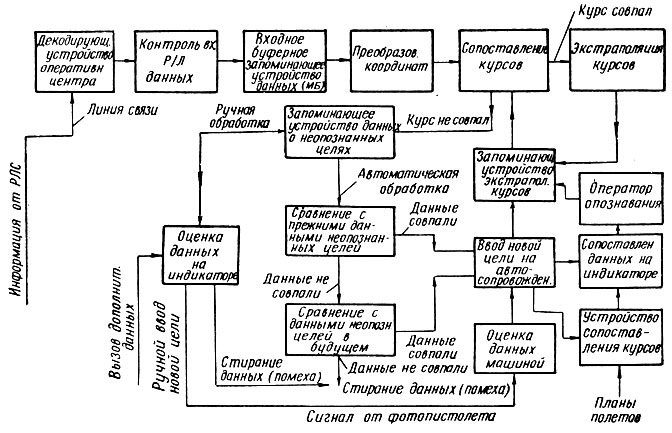
Рис. 6.9. Схема обработки радиолокационной информации в оперативном центре системы 'Сейдж'
Если данные не совпали, новая отметка фиксируется как возможно новая цель, данные о ней поступают в устройство запоминания данных о всех неопознанных целях, а машина посылает оператору сигнал в виде особой отметки на экране о несоответствии характеристик или наличии возможной ошибки. По желанию оператора дальнейшая обработка данных может вестись автоматически или вручную,
При автоматической обработке вновь поступившие данные о цели сравниваются с ранее поступившими данными о неизвестных целях, хранящимися в запоминающем устройстве машины. Если данные на этот раз совпадают, вычислительная машина вводит их в запоминающее устройство как новую цель, присваивает ей номер и переводит ее на автосопровождение. После этого она высвечивается на экранах индикаторов в посту уточнения и обобщения воздушной обстановки как новая цель. В это время машина о ней будет иметь, например, следующую информацию:
номер цели - В207,
скорость - 870 км/ч,
курс - 285,
высота - неизвестна,
состав цели - неизвестен,
принадлежность - не опознана.
Такая цель пользуется правом приоритета в отношении очередности измерения высоты, и машина немедленно посылает сигнал запроса о высоте и других характеристиках одному из высотомеров сектора. Полученный ответ содержит следующую информацию:
номер цели - В207,
высота - 13 км,
состав цели - 1,
Для этой цели машина начинает прокладку курса и подбирает все необходимые данные для оператора опознавания.
Если же данные и на этот раз не совпадают, вычислительная машина будет хранить эти данные в запоминающем устройстве в течение нескольких периодов обзора (обычно двух) для возможности производить сравнение в дальнейшем. Если данные за это время начали отличаться на некоторую величину по дальности и по времени локации, то вновь обнаруженная отметка считается новой целью, ей присваивается номер и она переводится на авто-сопровождение. Если же данные и в дальнейшем не совпадут и никакая закономерность не обнаруживается, сигнал принимается за шум и стирается из памяти машины.
При ручном методе обработки вся радиолокационная информация о целях рассматривается на индикаторе. Для всестороннего анализа отображаемой на индикаторе информации оператор с помощью клавиатуры кнопочного управления или фотопистолета может затребовать из вычислительной машины или по телефону от различных радиолокационных станций (обнаружения или высотомера) дополнительную информацию о высоте, скорости, курсе и других характеристиках сомнительной цели, а также вызвать информацию о планах полетов, с которыми, по его мнению, курс данной цели может быть сопоставлен. Затребованная информация через несколько секунд отображается на тайпотроне пульта оператора. Задача оператора сводится к тому, чтобы в результате сопоставления данных и анализа наблюдаемой картины воздушной обстановки квалифицировать этот сигнал как шум и стереть из памяти машины или же принять его за новую цель и с помощью фотопистолета, направляемого на изображение этой цели на экране индикатора, ввести координаты ее в запоминающее устройство вычислительной машины. Машина еще раз оценивает эти данные и, если воспринимает этот сигнал как новую цель, присваивает ей номер, берет на сопровождение и начинает вести прокладку курса.
Весь процесс ручной обработки и оценки данных машиной занимает всего несколько секунд. Этот метод применяется в том случае, когда из-за наличия большого количества шумов и других помех определить характер сигнала затруднительно.
Кроме подобного рода уточнения воздушной обстановки, операторы этого боевого поста производят и ее обобщение. В случае когда одна и та же цель сопровождается одновременно несколькими радиолокационными станциями, из-за возможных погрешностей каждой из них в оперативный центр может поступить фактически несколько отметок. В соответствии с программой машина сама производит анализ и обобщение таких отметок в одну цель, если расхождение в координатах этих отметок было в допустимых пределах. В противном случае таким обобщением занимаются операторы. Благодаря такой операции при дальнейшей обработке информации исключается возможность принятия одной цели за несколько.
Кроме того, при сложной воздушной обстановке для облегчения в дальнейшем процессов обработки информации и особенно целераспределения как машина, так и операторы могут несколько однородных целей, летящих общим строем, объединить в одну укрупненную цель и в ее формуляр, в ячейку состава цели ввести цифру, показывающую действительное количество одиночных целей в этой групповой цели. Такие операции значительно облегают режим работы вычислительной машины при напряженной ситуации.
После уточнения и обобщения воздушной обстановки вся информация о целях поступает к операторам опознавания.
В еще более обобщенном виде информация о воздушной обстановке в секторе передается автоматически машиной на вышестоящий командный пункт.
Опознавание целей. Опознавание своих военных самолетов, оборудованных радиолокационной аппаратурой опознавания "свой - чужой" (МкХ), не представляет затруднений. На экранах индикаторов воздушной обстановки рядом с отметками таких самолетов появляется либо крестик (на отдельных индикаторах), либо в формуляре этой цели в ячейке "принадлежность" высвечивается буква "F". Но многие свои самолеты не оборудованы аппаратурой опознавания и их опознавание производится в процессе обработки информации в оперативном центре машиной и операторами опознавания, размещающимися в специальном посту опознавания.
При появлении на экране индикатора оператора опознавания новой неопознанной цели (отметка без крестика) на его пульте звучит зуммер и зажигается красная лампочка. Выключив зуммер, оператор посылает вычислительной машине команду сравнить данные этой цели с планами полетов, введенными в машину с помощью перфокарт. План полета содержит данные о курсе, скорости, высоте полета и предполагаемом времени прибытия самолета в определенные пункты.
Данные о неопознанных целях поступают на устройство сопоставления курсов, где они сопоставляются с известными курсами полета своих самолетов. Оператор наблюдает обстановку на экране индикатора и контролирует работу устройства сопоставления курсов.
Если машина обнаруживает совпадение курсов, она квалифицирует цель как свою и отмечает ее признаком опознавания "свой" (крестик или буква "F" в формуляре). При затруднениях в работе машины оператор опознавания с помощью клавиатуры кнопок или фотопистолета вызывает на свой тайпотрон данные о Цели и данные о наиболее подходящем плане полета. На тайпотроне высвечивается два ряда букв и цифр. В одном ряду представлены курс, скорость и высота исследуемой цели, в другом- аналогичные данные своего самолета по плану полета. Оператор должен проанализировать данные, поскольку они могут отличаться вследствие того, что самолет часто может отклоняться от заявленного плана полета: лететь с опережением или опозданием по времени или сбиться с курса.
Если данные исследуемой цели намного отличаются от данных запланированного полета или если эта цель ведет боевые действия, оператор считает ее вражеской и, нажимая соответствующую кнопку, вводит признак опознавания "чужой" (буква "Н" в формуляре), который отображается на экранах всех индикаторов оперативного центра, и этим самым дает команду машине передать цель и всю информацию о ней на экраны операторов выбора и распределения боевых средств.
Если опознанная вражеская цель находится вблизи границы с другим сектором и летит в его сторону, то вычислительная машина данного сектора в порядке взаимодействия посылает вычислительной машине соседнего сектора предупреждающий сигнал о возможной передаче цели и автоматически передает всю информацию об этой цели. В момент пересечения целью границы осуществляется передача этой цели на сопровождение ее машиной принимающего сектора по данным своих радиолокационных станций, которым до этого машина выдавала предварительное целеуказание по данным машины соседнего сектора. После приема цели одна машина уведомляет другую о состоявшейся передаче этой цели.
Если цель не будет опознана в течение одной минуты, оператор опознавания с помощью фотопистолета или кнопочного переключателя на пульте управления отмечает ее как "неопознанную", что для машины равнозначно "чужой" цели, и машина эту цель и всю информацию о ней передает операторам выбора и распределения боевых средств.
|
ПОИСК:
|
При использовании материалов активная ссылка обязательна:
http://weapons-world.ru/ 'Оружие и военная история'